Las instrucciones de la API FMZ
El autor:No hay nada, Creado: 2020-04-20 10:19:00, Actualizado: 2023-04-12 14:44:56// true
}
[http://underscorejs.org/](http://underscorejs.org/)
```js
function main() {
var sum = _.reduce([1, 2, 3], function(memo, num){return memo + num}, 0)
Log(sum)
}
C++bibliotecahttps://nlohmann.github.io/json/void main() { json table = R"({"type": "table", "title": "Position Information", "cols": ["Column1", "Column2"], "rows": [["abc", "def"], ["ABC", "support color #ff0000"]]})"_json; LogStatus("`" + table.dump() + "`"); LogStatus("Fist line message\n`" + table.dump() + "`\nThird line message"); json arr = R"([])"_json; arr.push_back(table); arr.push_back(table); LogStatus("`" + arr.dump() + "`"); table = R"({ "type" : "table", "title" : "Position Operation", "cols" : ["Column1", "Column2", "Action"], "rows" : [ ["abc", "def", {"type": "button", "cmd": "coverAll", "name": "close position"}] ] })"_json; LogStatus("`" + table.dump() + "`", "\n`" + R"({"type": "button", "cmd": "coverAll", "name": "close position"})"_json.dump() + "`"); }
Indicadores de función en la biblioteca Talib
Entre los parámetros de las siguientes funciones:Records[Close]representa el precio de cierre en los datos de línea k entrantes,Array()representa una matriz, yArray(outInteger)representa el retorno de una matriz de datos enteros.
Ejemplo de código para llamarCCIIndicador:
function main() {
var records = exchange.GetRecords()
var cci = talib.CCI(records, 14)
Log(cci)
}
import talib
def main():
records = exchange.GetRecords()
# the parameter "14" can be default
cci = talib.CCI(records.High, records.Low, records.Close, 14)
Log(cci)
void main() {
auto records = exchange.GetRecords();
auto cci = talib.CCI(records, 14);
Log(cci);
}
-
Pattern Recognition:Indicador Descripción CDL2CROWS: las personas que se encuentran en el centro de la ciudad Dos cuervos CDL2CROWS ((Registros [Abrir, Alto, Bajo, Cerrar]) = Array ((outInteger) CDL3BLACKCROWS (Cervas negras) Los tres cuervos negros CDL3BLACKCROWS ((Records[Open,High,Low,Close]) = Array ((outInteger) CDL3Dentro Tres dentro arriba/abajo CDL3INSIDE ((Records[Open,High,Low,Close]) = Array ((outInteger) CDL3LINESTRIKE también se utiliza para el tratamiento de la enfermedad. Huelga de tres líneas CDL3LINESTRIKE ((Records[Open,High,Low,Close]) = Array ((outInteger) CDL3 Fuera Tres fuera arriba/abajo CDL3OUTSIDE ((Records[Open,High,Low,Close]) = Array ((outInteger) CDL3Estrellas del Sur Tres estrellas en el sur CDL3STARSINSOUTH ((Records [Open,High,Low,Close]) = Array ((outInteger) CDL3SOLDADOS BLANCOS Tres soldados blancos avanzando CDL3 WHITESOLDIERS ((Registros [Abrir, Alto, Bajo, Cerrar]) = Matriz ((fuera de entero) CDLABANDONEDBABY El niño abandonado Un bebé abandonado CDLABANDONEDBABY ((Registros [Abrir,Alto,Bajo,Cerrar],Penetración = 0.3) = Matriz ((fueraInteger) El CDLADVANCEBLOCK Bloqueo anticipado CDLADVANCEBLOCK ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDLBELTHOLD Sostener el cinturón CDLBELTHOLD ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDLBRAKAWAY Desintegración CDLBREAKAWAY ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDLClozingMarubozu Cerrando el Marubozu CDLCLOSINGMARUBOZU ((Records[Open,High,Low,Close]) = Array ((outInteger)) CDLCONCEALBABYSWALL (en inglés) Escondiendo a la golondrina bebé CDLCONCEALBABYSWALL ((Records[Open,High,Low,Close]) = Array ((outInteger) CDLContraataque Contraataque. CDLCONTRAATTACK ((Registros [Abrir,Alto,Bajo,Cerrar]) = Array ((fueraInteger) CDLDARKCLOUDCOVER ¿ Qué quieres decir con eso? Cubierta de nubes oscuras CDLDARKCLOUDCOVER ((Records[Open,High,Low,Close],Penetración = 0.5) = Array ((outInteger) El CDLDOJI El Doji. CDLDOJI ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDLDOJISTAR Estrella Doji CDLDOJISTAR ((Registros [Abrir, Alto, Bajo, Cerrar]) = Array ((outInteger) El CDDRAGONFLYDOJI Doji de la libélula CDLDRAGONFLYDOJI ((Records[Open,High,Low,Close]) = Array ((outInteger) El tratamiento de la fibra de vidrio El patrón de absorción CDLENGULFING ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDVENINGDOJISTAR fue lanzado en el año 2000. Estrella de la Noche Doji CDLEVENINGDOJISTAR ((Records[Open,High,Low,Close],Penetración = 0.3) = Array ((outInteger) El CDLEVENINGSTAR Estrella de la tarde CDLEVENINGSTAR ((Records[Open,High,Low,Close],Penetración = 0.3) = Array ((outInteger) CDLGAPSIDESIDEBlanco Líneas blancas recónditas con espacio superior/inferior CDLGAPSIDESIDEWHITE ((Registros [Abrir,Alto,Bajo,Cerrar]) = Array ((fuera de entero) El CDLGravestonedoji Doji de la lápida CDLGRAVESTONEDOJI ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDLHAMMER El martillo CDLHAMMER ((Records[Open,High,Low,Close]) = Array ((outInteger) El hombre que se mueve Hombre colgado CDLHANGINGMAN ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDLHARAMI Patrón Harami CDLHARAMI ((Records[Open,High,Low,Close]) = Array ((outInteger) CDLHARAMICROS Patrón Harami cruzado CDLHARAMICROSS ((Records[Open,High,Low,Close]) = Array ((outInteger) CDHIGHWAVE Velas de alta onda CDLHIGHWAVE ((Records[Open,High,Low,Close]) = Array ((outInteger) ¿ Qué es esto? Patrón de Hikkake CDLHIKKAKE ((Records[Open,High,Low,Close]) = Array ((outInteger) ¿ Qué es esto? Modelo de Hikkake modificado CDLHIKKAKEMOD ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDLHOMINGPIGEON Pombas de viaje CDLHOMINGPIGEON ((Records[Open,High,Low,Close]) = Array ((outInteger) ¿ Qué es esto? Tres cuervos idénticos CDLIDENTICAL3CROWS ((Records[Open,High,Low,Close]) = Array ((outInteger) CDLINNECK Patrón en el cuello CDLINNECK ((Records[Open,High,Low,Close]) = Array ((outInteger) CDLINVERTEDHAMMER y otros Martillo invertido CDLINVERTEDHAMMER ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDLKICK Me estoy pateando. CDLKICKING ((Registros [Abrir, Alto, Bajo, Cerrar]) = Array ((outInteger) El número de puntos de referencia es el número de puntos de referencia. Pulsando - toro/oso determinado por el marubozu más largo CDLKICKINGBYLENGTH ((Records[Open,High,Low,Close]) = Array ((outInteger) ¿Qué quiere decir? Bajo de la escalera CDLLADDERBOTTOM ((Records[Open,High,Low,Close]) = Array ((outInteger) ¿Qué es esto? Dojz de Piernas Largas CDLLONGLEGGEDDOJI ((Registros [Abrir, Alto, Bajo, Cerrar]) = Matriz ((fuera de entero) CDLLONGLINE Candela de línea larga CDLLONGLINE ((Records[Open,High,Low,Close]) = Array ((outInteger) CDLMARUBOZU El Marubozu CDLMARUBOZU ((Records[Open,High,Low,Close]) = Array ((outInteger)) El CDLMATCHINGLOW La coincidencia es baja CDLMATCHINGLOW ((Records[Open,High,Low,Close]) = Array ((outInteger) CDLMATHOLD Mantener el tapón CDLMATHOLD ((Records[Open,High,Low,Close],Penetración = 0.5) = Array ((outInteger) CDMORNINGDOJISTAR. ¿ Qué quieres decir? Estrella del Doji de la mañana CDLMORNINGDOJISTAR ((Records[Open,High,Low,Close],Penetración = 0.3) = Array ((outInteger) CDLMORNINGSTAR. ¿ Qué es esto? Estrella de la mañana CDLMORNINGSTAR ((Records[Open,High,Low,Close],Penetración = 0.3) = Array ((outInteger)) ¿ Qué es esto? Patrón en el cuello CDLONNECK ((Records[Open,High,Low,Close]) = Array ((outInteger) El Consejo de Seguridad El patrón perforante CDLPIERCING ((Records[Open,High,Low,Close]) = Array ((outInteger) ¿ Qué es esto? El hombre del rickshaw CDLRICKSHAWMAN ((Registros [Abrir, Alto, Bajo, Cerrar]) = Array ((fueraInteger) Métodos para el CDLRISEFALL3 Tres métodos para subir/bajar CDLRISEFALL3METHODS ((Records[Open,High,Low,Close]) = Array ((outInteger) Líneas de separación Líneas de separación CDLSEPARATINGLINES ((Records[Open,High,Low,Close]) = Array ((outInteger) CDLSHOOTINGSTAR. ¿ Qué quieres decir? Estrella fugaz CDLSHOOTINGSTAR ((Registros [Abrir, Alto, Bajo, Cerrar]) = Matriz ((fuera de entero) CDLScortocircuito Candela de línea corta CDLSHORTLINE ((Records[Open,High,Low,Close]) = Array ((outInteger) CDLSPINNINGTOP. ¿ Qué es eso? La parte superior giratoria CDLSPINNINGTOP ((Records[Open,High,Low,Close]) = Array ((outInteger) Modelo de instalación Patrón estancado CDLSTALLEDPATTERN ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDLSTICKSANDWICH El sándwich de palo CDLSTICKSANDWICH ((Records[Open,High,Low,Close]) = Array ((outInteger) ]) El número de bits de la matriz es el número de bits de la matriz. El CDLTAKURI Takuri (Doji de la mosca dragón con una sombra inferior muy larga) CDLTAKURI ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDLTASUKIGAP La brecha de Tasuki CDLTASUKIGAP ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDL es un sistema de control. El patrón de empuje CDLTHRUSTING ((Records[Open,High,Low,Close]) = Array ((outInteger) El CDLTRISTAR Patrón de tristar CDLTRISTAR ((Records[Open,High,Low,Close]) = Array ((outInteger) ¿Qué quieres decir con eso? El río Unique 3 CDLUNIQUE3RIVER ((Records[Open,High,Low,Close]) = Array ((outInteger)) CDLUPSIDEGAP2CROWS y el resto de los equipos La brecha hacia arriba Dos cuervos CDLUPSIDEGAP2CROWS ((Registros [Abrir, Alto, Bajo, Cerrar]) = Array ((fuera de Integer) Métodos para el análisis de la calidad de los productos Diferencia de alza/baja Tres métodos CDLXSIDEGAP3METHODS ((Records[Open,High,Low,Close]) = Array ((outInteger) -
Volume Indicators:Indicador Descripción A.D. Línea A/D de Chaikin AD ((Registros[Alto, Bajo, Cerrado, Volumen]) = Array ((extraReal) Adosc Ocilador A/D de Chaikin ADOSC ((Records[High,Low,Close,Volume],Periodo rápido = 3,Periodo lento = 10) = Array ((outReal) Vehículo de transporte Sobre el volumen del saldo OBV ((Records[Close],Records[Volume]) = Array ((outReal)) -
Math Transform:Indicador Descripción Acceso a la información ACos trigonométrico vectorial ACOS ((Records[Close]) = Array ((outReal) El ASIN ASin trigonométrico vectorial ASIN ((Records[Close]) = Array ((outReal) ATAN El vector trigonométrico ATan ATAN ((Registros[Cerrar]) = Array ((outReal) El CEIL Techo vectorial CEIL ((Records[Close]) = Array ((outReal) Costo de las operaciones Cos trigonométricos vectoriales COS ((Records[Close]) = Array ((outReal) COSH Cosh trigonométrico vectorial COSH ((Records[Close]) = Array ((outReal) Exclusivo Aritmética vectorial Exp EXP ((Records[Close]) = Array ((outReal) Piso Bajo el vector FLOOR ((Records[Close]) = Array ((outReal) LN Vector log natural LN ((Records[Close]) = Array ((outReal) Localización de la empresa Vector log10 LOG10 ((Records[Close]) = Array ((outReal) No Sin vectorial trigonométrico SIN ((Records[Close]) = Array ((outReal) El SINH Sincronización trigonométrica vectorial SINH ((Records[Close]) = Array ((outReal) SQRT Raíz cuadrada del vector SQRT ((Records[Close]) = Array ((outReal) TAN Tan trigonométrico vectorial TAN ((Records[Close]) = Array ((outReal) TANH Trigonometría vectorial TANH ((Records[Close]) = Array ((outReal) -
Math Operators:Indicador Descripción Se trata de: Valor más alto durante un período determinado MAX ((Records[Close],Periodo de tiempo = 30) = Array ((outReal) Maxindex Indice de valor más alto durante un período determinado MAXINDEX ((Records[Close],Período de tiempo = 30) = Array ((outInteger) En el caso de los productos Valor más bajo durante un período determinado MIN ((Records[Close],Período de tiempo = 30) = Array ((outReal) Minindex Indice del valor más bajo durante un período determinado MININDEX ((Records[Close],Período de tiempo = 30) = Matriz ((outInteger) Se trata de un Valores más bajos y más altos durante un período determinado En este caso, el valor de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores de los valores Se trata de un Índices de valores más bajos y más altos durante un período determinado En el caso de los registros, el número de datos que se registran en el archivo es el número de datos que se registran. SUMO Resumen SUM ((Records[Close],Período de tiempo = 30) = Matriz ((outReal) -
Cycle Indicators:Indicador Descripción Se aplicará el método de cálculo de las emisiones de CO2 en el caso de las emisiones de gases de efecto invernadero Transformación de Hilbert - Período de ciclo dominante HT_DCPERIOD ((Records[Close]) = Array ((outReal) Se trata de una serie de datos. Transformación de Hilbert - Fase del ciclo dominante En este caso, el valor de los datos de la matriz es el valor de los datos de la matriz de la matriz. Se aplicará la siguiente regla: Transformación de Hilbert - Componentes del fasor HT_PHASOR ((Records[Close]) = [Array ((outInPhase),Array ((outQuadrature) ] Se trata de un sistema de información. Transformación de Hilbert - Onda sinusoidal En este caso, el valor de la función de la función de la función de la función de la función de la función de la función de la función de la función de la función de la función de la función de la función de la función de la función de la función de la función de la función de la función de la función. El número de puntos de referencia es el siguiente: Transformación de Hilbert - Tendencia frente al modo de ciclo HT_TRENDMODE ((Records[Close]) = Array ((outInteger) -
Volatility Indicators:Indicador Descripción El ATR Rango verdadero medio ATR ((Records[High,Low,Close],Período de tiempo = 14) = Array ((outReal) NATR Rango verdadero promedio normalizado NATR ((Records[High,Low,Close],Período de tiempo = 14) = Matriz ((outReal) El nombre de la Rango verdadero TRANGE ((Records[High,Low,Close]) = Array ((outReal) -
Overlap Studies:Indicador Descripción Las entidades de crédito y de crédito Las bandas de Bollinger BBANDS ((Records[Close],Time Period = 5,Desviaciones hacia arriba = 2,Desviaciones hacia abajo = 2,MA Tipo = 0) = [Array ((outRealUpperBand),Array ((outRealMiddleBand),Array ((outRealLowerBand) ] El DEMA Promedio móvil exponencial doble DEMA ((Records[Close],Período de tiempo = 30) = Array ((outReal) El EMA Promedio móvil exponencial EMA ((Records[Close],Período de tiempo = 30) = Array ((outReal) Se trata de una línea de tendencia. Transformación de Hilbert - Tendencia instantánea En este caso, el valor de la línea de referencia es el valor de la línea de referencia. El KAMA Promedio móvil adaptativo de Kaufman KAMA ((Records[Close],Período de tiempo = 30) = Array ((outReal) - ¿Qué es? Promedio móvil MA ((Records[Close],Período de tiempo = 30,MA Tipo = 0) = Matriz ((outReal) - ¿ Por qué? Mediana móvil adaptativa de MESA MAMA ((Records[Close],Límite rápido = 0.5,Límite lento = 0.05) = [Array ((outMAMA),Array ((outFAMA) ] Punto medio Punto medio del período MIDPOINT ((Records[Close],Período de tiempo = 14) = Array ((outReal) Precio medio Precio del punto medio durante el período MIDPRICE ((Records[High,Low],Time Period = 14) = Array ((outReal) Las medidas de seguridad SAR parabólico SAR ((Records[High,Low],Factor de aceleración = 0,02,AF máximo = 0,2) = Array ((outReal) El SAREXT SAR parabólica - extendida SAREXT ((Registros[Alto, Bajo],Valor de inicio = 0,Offset en el sentido inverso = 0,AF Init Largo = 0.02,AF Largo = 0.02,AF Máximo Largo = 0.2,AF Init Corto = 0.02,AF Corto = 0.02,AF Máximo Corto = 0.2) = Array ((outReal) La SMA Promedio móvil simple SMA ((Records[Close],Período de tiempo = 30) = Array ((outReal) T3 La media móvil exponencial triple (T3) T3 ((Records[Close],Período de tiempo = 5,Factor de volumen = 0.7) = Array ((outReal) TEMA (en inglés) Promedio móvil exponencial triple TEMA ((Records[Close],Período de tiempo = 30) = Matriz ((outReal) Trima Promedio móvil triangular TRIMA ((Records[Close],Período de tiempo = 30) = Array ((outReal) La WMA Promedio móvil ponderado WMA ((Records[Close],Período de tiempo = 30) = Array ((outReal) -
Statistic Functions:Indicador Descripción Se trata de una serie de datos. Regresión lineal LINEARREG ((Records[Close],Período de tiempo = 14) = Array ((outReal) El valor de las emisiones de CO2 Ángulo de regresión lineal LINEARREG_ANGLE ((Records[Close],Período de tiempo = 14) = Array ((outReal) Se puede utilizar el código de código de la aplicación. Intercepción de regresión lineal LINEARREG_INTERCEPT ((Records[Close],Periodo de tiempo = 14) = Array ((outReal) El valor de las partidas de los valores de las partidas Pendiente de regresión lineal LINEARREG_SLOPE ((Records[Close],Periodo de tiempo = 14) = Array ((outReal) Se trata de una Desviación estándar STDDEV ((Records[Close],Periodo de tiempo = 5,Desviaciones = 1) = Matriz ((outReal) El TSF Pronóstico de serie temporal TSF ((Records[Close],Período de tiempo = 14) = Matriz ((outReal) El VAR Variación VAR ((Records[Close],Período de tiempo = 5,Desviaciones = 1) = Array ((outReal) -
Momentum Indicators:Indicador Descripción ADX Indice de movimiento direccional medio ADX ((Registros[Alto, Bajo, Cerrar],Período de tiempo = 14) = Array ((outReal) ADXR Clasificación media del índice de movimiento direccional ADXR ((Records[High,Low,Close],Período de tiempo = 14) = Array ((outReal) Aplicación de las normas Oscilador de precios absoluto APO ((Records[Close],Periodo rápido = 12,Periodo lento = 26,MA Tipo = 0) = Array ((outReal) ¿Qué quieres decir? Aroon, ¿qué quieres decir? AROON ((Records[High,Low],Período de tiempo = 14) = [Array ((outAroonDown),Array ((outAroonUp) ] AROONOSC Oscilador de Aroon AROONOSC ((Records[Alto, Bajo],Período de tiempo = 14) = Array ((outReal) El BOP El equilibrio del poder BOP ((Records[Open,High,Low,Close]) = Array ((outReal)) CCI Indice de canales de productos básicos CCI ((Records[High,Low,Close],Período de tiempo = 14) = Array ((outReal) OCM Oscilador de impulso de Chande CMO ((Registros[Cerrar],Período de tiempo = 14) = Matriz ((outReal) DX Indice de movimiento direccional DX ((Records[High,Low,Close],Período de tiempo = 14) = Array ((outReal) El MACD Promedio móvil de convergencia/divergencia MACD ((Récords[Close],Periodo rápido = 12,Periodo lento = 26,Periodo de señal = 9) = [Array ((outMACD),Array ((outMACDSignal),Array ((outMACDHist) ] El código MACDEXT MACD con tipo de MA controlable MACDEXT ((Records[Close],Periodo rápido = 12,MA rápido = 0,Periodo lento = 26,MA lento = 0,Periodo de señal = 9,MA señal = 0) = [Array(outMACD),Array ((outMACDSignal),Array(outMACDHist] El MACDFIX Medios móviles de convergencia/divergencia fijación 12/26 MACDFIX ((Records[Close],Periodo de señal = 9) = [Array ((outMACD),Array ((outMACDSignal),Array ((outMACDHist) ] Financiamiento por cuenta ajena Índice de flujo de dinero MFI ((Registros[Alto, Bajo, Cerrado, Volumen],Período de tiempo = 14) = Matriz ((extraReal) Se trata de una serie de Indicador de dirección menos MINUS_DI ((Registros[Alto, Bajo, Cerrar],Período de tiempo = 14) = Array ((outReal) Se trata de un sistema de gestión de datos. Movimiento en dirección negativa MINUS_DM ((Registros[Alto, Bajo],Periodo de tiempo = 14) = Array ((outReal) - ¿ Por qué? Impulso MOM ((Records[Close],Período de tiempo = 10) = Array ((outReal) Se trata de un sistema de gestión de datos. Indicador de dirección más PLUS_DI ((Registros[Alto, Bajo, Cerrar],Período de tiempo = 14) = Array ((outReal) Se trata de un documento de identificación. Más el movimiento direccional PLUS_DM ((Registros[Alto, Bajo],Período de tiempo = 14) = Array ((outReal) PPO Oscilador de precios por porcentaje PPO ((Records[Close],Periodo rápido = 12,Periodo lento = 26,MA Tipo = 0) = Array ((outReal) La ROC Tasa de cambio: (precio/previo precio) -1) * 100 ROC ((Records[Close],Período de tiempo = 10) = Matriz ((outReal) El ROCP Tasa de cambio Porcentaje: (precio-previo al precio) /previo al precio ROCP ((Records[Close],Período de tiempo = 10) = Array ((outReal) RECR Ratio de tasa de cambio: (precio/prevPrice) ROCR ((Records[Close],Período de tiempo = 10) = Array ((outReal) RECR100 Escala de variación del índice 100: (precio/previo precio) *100 ROCR100 ((Records[Close],Time Period = 10) = Array ((outReal)) Indicador de riesgo Indice de fuerza relativa RSI ((Records[Close],Período de tiempo = 14) = Matriz ((outReal) STOCH Estocástico STOCH ((Registros [Alto, Bajo, Cerrado],Periodo rápido-K = 5,Periodo lento-K = 3,Periodo lento-K MA = 0,Periodo lento-D = 3,Periodo lento-D MA = 0) = [Array(outSlowK),Array(outSlowD] STOCHF Rápido estocástico STOCHF ((Registros [Alto, Bajo, Cerrado],Periodo rápido-K = 5,Periodo rápido-D = 3,Periodo rápido-D MA = 0) = [Array ((outFastK),Array ((outFastD) ] STOCHRSI Indice de fuerza relativa estocástico STOCHRSI ((Registros[Cerrar],Período de tiempo = 14,Período rápido-K = 5,Período rápido-D = 3,Período rápido-D MA = 0) = [Array(outFastK),Array(outFastD] TRIX La tasa de cambio de un día (ROC) de una EMA triple lisa TRIX ((Records[Close],Período de tiempo = 30) = Array ((outReal) Las condiciones de los productos: Oscilador definitivo ULTOSC ((Records[High,Low,Close],Primero período = 7,Segundo período = 14,Tercer período = 28) = Array ((outReal) ¿Qué es esto? Williams % R WILLR ((Registros [Alto, Bajo, Cerrar], Período de tiempo = 14) = Array ((outReal) -
Price Transform:Indicador Descripción Precio medio Precio medio AVGPRICE ((Records[Open,High,Low,Close]) = Array ((outReal)) Medición de los costes Precio medio MEDPRICE ((Records[High,Low]) = Array ((outReal) Tipo de precio Precio típico TYPPRICE ((Records[High,Low,Close]) = Array ((outReal) Precio del producto Precio de cierre ponderado WCLPRICE ((Records[High,Low,Close]) = Array ((outReal)
Datos fundamentales
La plataforma de comercio de FMZ Quant admite backtesting y consulta de varios datos fundamentales en el bot. Los datos fundamentales son proporcionados en tiempo real por el centro de datos de la plataforma de comercio de FMZ Quant, y el centro de datos continuará recopilando y resumiendo varios datos fundamentales.
Invocación de datos
Utilizaciónexchange.GetData(Source)La función para obtener los datos fundamentales.
Los datos fundamentales de la criptomoneda no se han recopilado temporalmente.
Formato de datos
Los datos fundamentales de la criptomoneda no se han recopilado temporalmente.
Extensión de la API de la plataforma FMZ
La plataforma Quant Trading de FMZ admite la invocación programática de varias funciones de la plataforma, y ha abierto la API extendida.
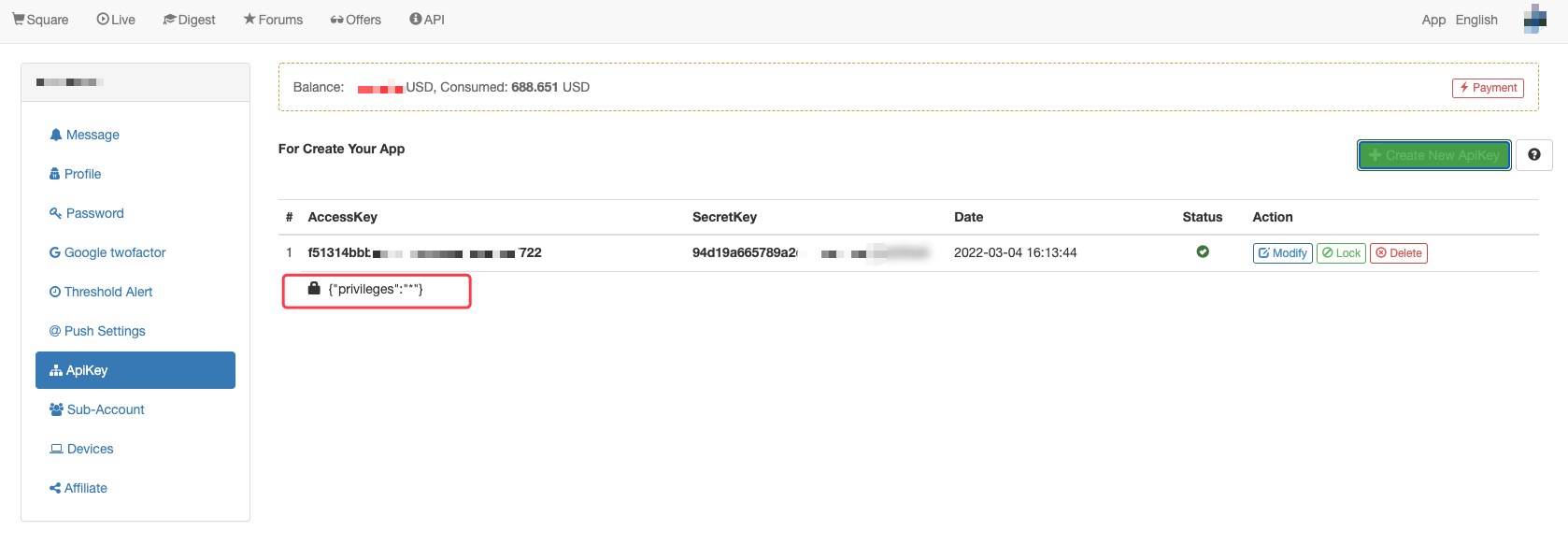
Apoya la extensión de administración de autoridad de API, como se muestra en la figura:
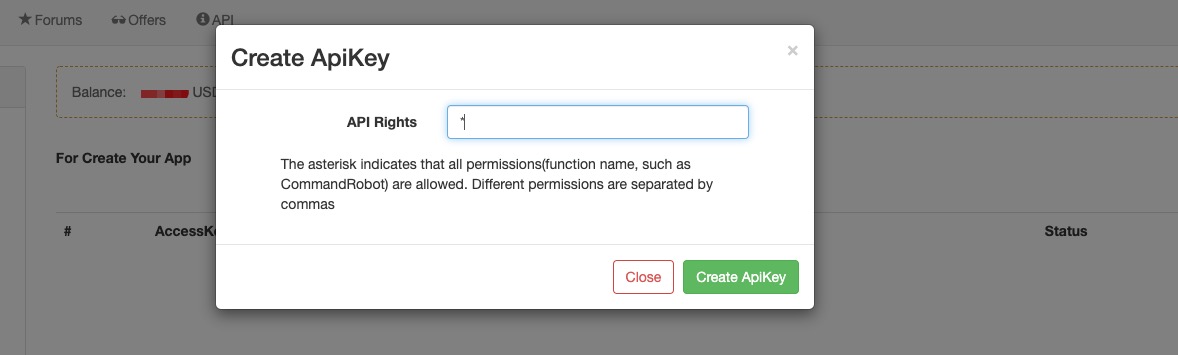
Permite la nueva adiciónAPI KEYPara tener todos los permisos.*En el cuadro de entrada de permisos de API para abrir todos los permisos de interfaz. Especifique permisos de interfaz específicos e introduzca los nombres de funciones API extendidos correspondientes, separados por comas, comoGetRobotDetail, DeleteRobot, es decir, dar estoAPI KEYel permiso paraObtener la interfaz del bot información detalladayborrar la interfaz del bot.
Crear ApiKey
Código de devolución de API
| Descripción | Código |
|---|---|
| Ejecución exitosa | 0 |
| Clave de API equivocada | 1 |
| Firma equivocada. | 2 |
| Error de no uso | 3 |
| Método incorrecto | 4 |
| Parámetro incorrecto | 5 |
| Error interno desconocido | 6 |
Estatus del bot
(Inicio normal)
| Estatus de las personas | Código |
|---|---|
| En inactividad | 0 |
| En funcionamiento | 1 |
| Paración | 2 |
| Se ha firmado. | 3 |
| Se detiene. | 4 |
| La estrategia tiene errores. | 5 |
- ¿ Qué es eso?
| Estatus de las personas | Código |
|---|---|
| La estrategia ha expirado, y por favor póngase en contacto con el escritor para comprarlo de nuevo | -1 |
| No se ha encontrado ningún docker | -2 |
| Error de compilación de la estrategia | -3 |
| El bot ya está funcionando. | -4 |
| Saldo insuficiente | -5 |
| El número de estrategias concurrentes excede el límite | -6 |
Métodos de verificación
Verificación de fichas
Utilizaciónmd5método de cifrado para verificar.
Python, ejemplos de llamadas de lenguaje Golang:
#!/usr/bin/python
# -*- coding: utf-8 -*-
import time
import json
import ssl
ssl._create_default_https_context = ssl._create_unverified_context
try:
import md5
import urllib2
from urllib import urlencode
except:
import hashlib as md5
import urllib.request as urllib2
from urllib.parse import urlencode
accessKey = 'f27bfcXXXXXXXX013c62e98XXXXX817a'
secretKey = 'ffeXXXXXXXX085ff7269XXXXXXXX6f82'
def api(method, *args):
d = {
'version': '1.0',
'access_key': accessKey,
'method': method,
'args': json.dumps(list(args)),
'nonce': int(time.time() * 1000),
}
d['sign'] = md5.md5(('%s|%s|%s|%d|%s' % (d['version'], d['method'], d['args'], d['nonce'], secretKey)).encode('utf-8')).hexdigest()
# Note: for the timeout problem of "urllib2.urlopen" function, you can set the timeout time; for example, urllib2.urlopen ('https://www.fmz.com/api/v1', urlencode(d).encode('utf-8'), timeout = 10), that is, set timeout for 10 seconds
return json.loads(urllib2.urlopen('https://www.fmz.com/api/v1', urlencode(d).encode('utf-8')).read().decode('utf-8'))
# Return the docker list
print(api('GetNodeList'))
# Return the exchange list
print(api('GetPlatformList'))
# GetRobotList (offset, length, robotStatus, label); passing "-1" means obtaining all
print(api('GetRobotList', 0, 5, -1, 'member2'))
# CommandRobot(robotId, cmd) sends commands to the bot
print(api('CommandRobot', 123, 'ok'))
# StopRobot(robotId) returns the bot status code
print(api('StopRobot', 123))
# RestartRobot(robotId) returns the bot status code
print(api('RestartRobot', 123))
# GetRobotDetail(robotId) returns detailed bot information
print(api('GetRobotDetail', 123))
package main
import (
"fmt"
"time"
"encoding/json"
"crypto/md5"
"encoding/hex"
"net/http"
"io/ioutil"
"strconv"
"net/url"
)
// Fill in your own FMZ platform api key
var apiKey string = ""
// Fill in your own FMZ platform secret key
var secretKey string = ""
var baseApi string = "https://www.fmz.com/api/v1"
func api(method string, args ... interface{}) (ret interface{}) {
// Process args
jsonStr, err := json.Marshal(args)
if err != nil {
panic(err)
}
params := map[string]string{
"version" : "1.0",
"access_key" : apiKey,
"method" : method,
"args" : string(jsonStr),
"nonce" : strconv.FormatInt(time.Now().UnixNano() / 1e6, 10),
}
data := fmt.Sprintf("%s|%s|%s|%v|%s", params["version"], params["method"], params["args"], params["nonce"], secretKey)
h := md5.New()
h.Write([]byte(data))
sign := h.Sum(nil)
params["sign"] = hex.EncodeToString(sign)
// http request
client := &http.Client{}
// request
urlValue := url.Values{}
for k, v := range params {
urlValue.Add(k, v)
}
urlStr := urlValue.Encode()
request, err := http.NewRequest("GET", baseApi + "?" + urlStr, nil)
if err != nil {
panic(err)
}
resp, err := client.Do(request)
if err != nil {
panic(err)
}
defer resp.Body.Close()
b, err := ioutil.ReadAll(resp.Body)
if err != nil {
panic(err)
}
ret = string(b)
return
}
func main() {
settings := map[string]interface{}{
"name": "hedge test",
"strategy": 104150,
// K-line period parameter "60" means 60 seconds
"period": 60,
"node" : 73938,
"appid": "member2",
"exchanges": []interface{}{
map[string]interface{}{
"eid": "Exchange",
"label" : "test_bjex",
"pair": "BTC_USDT",
"meta" : map[string]interface{}{
// Fill in the access key
"AccessKey": "",
// Fill in the secret key
"SecretKey": "",
"Front" : "http://127.0.0.1:6666/exchange",
},
},
},
}
method := "RestartRobot"
fmt.Println("Call interface:", method)
ret := api(method, 124577, settings)
fmt.Println("main ret:", ret)
}
Verificación directa
Apoya la verificación sintoken(pasado)secret_keyPor ejemplo, la URL que da directamente instrucciones interactivas al bot, que se puede utilizar paraTradingViewo elWebHooken otros casos.
ParaCommandRobot(RobotId, Cmd)función, el parámetrononceno requiere verificación, y la frecuencia de acceso y los tiempos de visita de la interfaz no están limitados.
https://www.fmz.com/api/v1?access_key=xxx&secret_key=yyyy&method=CommandRobot&args=[186515,"ok12345"]
En la circunstancia de que se apoye la verificación directa, sóloCommandRobotInterfaz es compatible para obtener elBodyPor ejemplo, las configuraciones en elWebHook URLde lasTradingView:
https://www.fmz.com/api/v1?access_key=fd3be82e9e6e6ed4439f2793a5e9ca&secret_key=520b9f10f3768e6ad1af59ff25184&method=CommandRobot&args=[130350,+""]
Preste atención a la configuración de acuerdo con el siguiente formato:args=[130350,+""], en el que130350¿Es el robot?IDde la plataforma de comercio de FMZ Quant.
Configuración en el cuadro de mensaje (los datos
-
El formato JSON:
{"close": {{close}}, "name": "aaa"}El robot con
IDde las186515puede recibir la instrucción interactiva:{"close": 39773.75, "name": "aaa"}. -
Formato de texto:
BTCUSDTPERP Crossing 39700.00 close: {{close}}El robot con
IDde las186515puede recibir la instrucción interactiva:BTCUSDTPERP Crossing 39700.00 close: 39739.4.
Ejemplos dePython & GolangLlamadas por idioma:
#!/usr/bin/python
# -*- coding: utf-8 -*-
import json
import ssl
ssl._create_default_https_context = ssl._create_unverified_context
try:
import urllib2
except:
import urllib.request as urllib2
accessKey = 'your accessKey'
secretKey = 'your secretKey'
def api(method, *args):
return json.loads(urllib2.urlopen(('https://www.fmz.com/api/v1?access_key=%s&secret_key=%s&method=%s&args=%s' % (accessKey, secretKey, method, json.dumps(list(args)))).replace(' ', '')).read().decode('utf-8'))
# If APIKEY does not have the interface permission, the call to print(api('RestartRobot', 130350)) will fail, and the returned data is: {'code': 4, 'data': None}
# print(api('RestartRobot', 130350))
# Print bot details with ID 130350
print(api('GetRobotDetail', 130350))
package main
import (
"fmt"
"encoding/json"
"net/http"
"io/ioutil"
"net/url"
)
// Fill in your own FMZ platform api key
var apiKey string = "your access_key"
// Fill in your own FMZ platform secret key
var secretKey string = "your secret_key"
var baseApi string = "https://www.fmz.com/api/v1"
func api(method string, args ... interface{}) (ret interface{}) {
jsonStr, err := json.Marshal(args)
if err != nil {
panic(err)
}
params := map[string]string{
"access_key" : apiKey,
"secret_key" : secretKey,
"method" : method,
"args" : string(jsonStr),
}
// http request
client := &http.Client{}
// request
urlValue := url.Values{}
for k, v := range params {
urlValue.Add(k, v)
}
urlStr := urlValue.Encode()
request, err := http.NewRequest("GET", baseApi + "?" + urlStr, nil)
if err != nil {
panic(err)
}
resp, err := client.Do(request)
if err != nil {
panic(err)
}
defer resp.Body.Close()
b, err := ioutil.ReadAll(resp.Body)
if err != nil {
panic(err)
}
ret = string(b)
return
}
func main() {
method := "GetRobotDetail"
fmt.Println("Call interface:", method)
ret := api(method, 130350)
fmt.Println("main ret:", ret)
}
Utilice la API extendida en FMZ Quant para realizar el comercio de señales de alerta
Explicación de la API extendida
-
La API ampliada de la plataforma de comercio de FMZ Quant
https://www.fmz.com/api/v1?El símbolo anterior
?está seguido por los parámetros de solicitud.Los parámetros de solicitud descritos en
PythonLenguaje:{ 'version' : '1.0', # Access key, applied on the account management page 'access_key': '8a1f6c3785fd78a1848320e0b19js99f', # The specific method called 'method' : 'GetNodeList', # The parameter list of specific method algorithm 'args' : [], # Timestamp, in the unit of millisecond, is allowed to have 1 hour of time error both before and after the standard timestamp;the nonce must be greater than the nonce value of the last access 'nonce' : 1516292399361, # Signature 'sign' : '085b63456c93hfb243a757366600f9c2' }Cada nombre de parámetro está separado por el carácter
&, y los nombres y valores de los parámetros están relacionados con el símbolo=. La URL completa de la solicitud (tomandomethod=GetNodeListpor ejemplo):https://www.fmz.com/api/v1? access_key=8a1f6c3785fd78a1848320e0b19js99f& nonce=1516292399361& args=%5B%5D& sign=085b63456c93hfb243a757366600f9c2& version=1.0& method=GetNodeListPresta atención a que no hay
secret_keyentre los parámetros de solicitud. -
Método de firma En los parámetros de solicitud, el parámetro
signes una cadena cifrada, y el método de cifrado es el siguiente.Según el formato:
version + "|" + method + "|" + args + "|" + nonce + "|" + secretKeyDespués de concatenar las cadenas, useEl MD5algoritmo de cifrado para cifrar la cadena y convertirla en un valor de cadena de datos hexadecimal, referido como el valor del parámetro
sign.La referencia
PythonCódigo de la parte de firma:# parameter d = { 'version': '1.0', 'access_key': accessKey, 'method': method, 'args': json.dumps(list(args)), 'nonce': int(time.time() * 1000), } # Calculate "sign" signature (encrypted) d['sign'] = md5.md5(('%s|%s|%s|%d|%s' % (d['version'], d['method'], d['args'], d['nonce'], secretKey)).encode('utf-8')).hexdigest()
GetNodeList (()
GetNodeList()devuelve la lista de docker de la cuenta de la plataforma de negociación FMZ Quant correspondiente a laAPI KEYen la solicitud.
-
Parámetro No hay
-
Valor de retorno
{ "code": 0, "data": { "result": { "nodes": [{ // Version number "build": "3.3", "date": "2018-01-19 10:35:24", "id": 34500, "ip": "126.28.21.120", // Number of the bots running on this docker "loaded": 1, "name": "iZ9116xhkgtZ", // Whether online "online": true, // Operation system "os": "linux", // Whether to enable offline alert "wd": 0 }, ... ] }, "error": null } }
GetRobotGroupList (()
GetRobotGroupList()devuelve la lista de agrupación de bots de la cuenta de la plataforma de comercio de FMZ Quant correspondiente a laAPI KEYen la solicitud.
-
Parámetro No hay
-
Valor de retorno
{ "code":0, "data":{ "result":{ // All bot grouping information: group ID, group name "items":[{"id":1122,"name":"test"}] }, "error":null } }
Obtenga la lista de plataformas ((()
GetPlatformList()devuelve la lista de los intercambios que se han añadido por la cuenta de la plataforma de negociación FMZ Quant correspondiente a laAPI KEYen la solicitud.
-
Parámetro No hay
-
Valor de retorno
{ "code": 0, "data": { "result": { "platforms": [{ "eid": "Huobi", "id": 12483, // The label when adding a platform "label": "huobi - test ETH/ETC", "logo": "huobi.png", "name": "huobi", "stocks": ["LTC_BTC", "ETH_BTC", "ETC_BTC", "BCH_BTC"], "website": "https://www.huobi.pro/" }, { "eid": "AEX", "id": 16345, "label": "AEX", "logo": "", "name": "AEX", "stocks": ["LTC_BTC", "ETH_BTC", "ETC_BTC", "BCC_BTC"], "website": "https://www.aex.com/" }, ... ] }, "error": null } }
GetRobotList (¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡¡
GetRobotList(offset, length, robotStatus, label)devuelve la lista de robots de la cuenta de la plataforma de negociación FMZ Quant correspondiente a laAPI KEYen la solicitud.
-
Parámetro
offset,lengthyrobotStatusson de tipo entero, ylabeles de tipo de cadena.offsetlengthrobotStatus(pasar-1 significa obtener todo) label(etiqueta personalizada; todos los bots con la etiqueta pueden ser coqueteados)
Para
PythonEjemplo de código, consulte lo anteriorMétodo de verificación - Verificación de fichas, y el siguiente es elPythonEjemplo de invocación:print api('GetRobotList', 'member2')Imprimir la información de todos los robots con la etiqueta personalizadamember2.print api('GetRobotList', 0, 5, -1, 'member2')páginas de 0 a 5 y una lista de hasta 5 robotsmember2. -
Valor de retorno
{ "code": 0, "data": { "result": { "all": 53, "bots": [{ "date": "2017-12-25 09:29:27", "end_time": "2017-12-28 17:44:21", "id": 66054, // If the value is 1, the bot is a virtual platform bot "is_sandbox": 1, "name": "C++ test strategy", "node_guid": "705d9aaaaaaaa93b49baaaaa787581cb087", "profit": 0, "public": 0, "refresh": 151345645647000, "start_time": "2017-12-28 17:44:15", "status": 3, "strategy_id": 65365, "strategy_isowner": true, "strategy_name": "C++ Version Docker API Test Strategy(cryptocurrency futures and spot markets)", "wd": 0 }, ... ] }, "error": null } }
ComandoRobot(...)
CommandRobot(RobotId, Cmd)La interfaz envía el comando interactivo al robot correspondiente (robotID: RobotId) de laAPI KEYen la solicitud de la cuenta FMZ Quant (el comando interactivo es capturado por elGetCommand()API llamado en la estrategia y los retornos).
-
Parámetro
RobotIdes de tipo entero, es decir, el botID;Cmdes de tipo cadena, que envía comandos interactivos a los bots.RobotId, el botID, puede obtenerse mediante elGetRobotList(...)interface.Cmdes el comando interactivo enviado al bot; el comando será capturado por la funciónGetCommand(), que activa la lógica interactiva en la estrategia (para realizar la lógica interactiva en la estrategia, consulte elGetCommand()función en el fichero).
-
Valor de retorno
{ // The API request was successfully executed "code": 0, "data": { // However, sending a command to a bot that is not running returns failure "result": false, "error": null } }
StopRobot ((RobotId))
StopRobot(RobotId)deja de ejecutar el bot con el ID especificado (robotID: RobotId), correspondiente a laAPI KEYen la solicitud de la cuenta FMZ Quant.
-
Parámetro
RobotIdes de tipo entero, es decir, el botID, que se puede obtener medianteGetRobotList(...)interfaz;StopRobot(RobotId)La interfaz devuelve el código de estado del robot detenido. -
Valor de retorno
{ "code": 0, "data": { // 2 means stopping "result": 2, "error": null } }
Reinicie el robot
RestartRobot(RobotId, Settings)Reinicia el robot con el ID especificado (robotID: RobotId), correspondiente a laAPI KEYen la solicitud de la cuenta FMZ Quant.
Si el robot es creado por la API ampliada, la API ampliadaRestartRobot (RobotId, Settings)Se debe utilizar para reiniciar, y elSettingsEl parámetro debe ser pasado.
El robot creado en la página de la plataforma se puede reiniciar a través de la API extendida o haciendo clic en el botón de la página.SettingsParámetro, o simplemente pasar el elRobotIdParámetro. Si sólo pasa elRobotIdParámetro, arranque el bot de acuerdo con la configuración actual del bot.
-
Parámetro
-
Sin configurar el bot, el parámetro de la estrategia
Settings:RobotIdes de tipo entero; el robotIDpuede obtenerse medianteGetRobotList(...). -
Con la configuración del bot, el parámetro de estrategia
Settings:RobotIdes de tipo entero; el botIDpuede obtenerse medianteGetRobotList(...).Settingses deJSONtipo de objeto.Settingsel formato del parámetro como sigue:Settings = { "name": "hedge test", // Strategy parameter "args": [["Interval", 500]], // Strategy ID, which can be obtained with "GetStrategyList" method "strategy": 25189, // K-line period parameter "60" means 60 seconds "period": 60, // Specify on which docker to run; if the attribute is not written, it will be automatically assigned to run "node" : 51924, // Custom field "appid": "member2", "exchanges": [ // ZB; "pid" can be obtained by "GetPlatformList" method {"pid": 15445, "pair": "ETH_BTC"}, // OKEX; 2 exchange objects are configured {"pid": 13802, "pair": "BCH_BTC"}, // In addition to the platforms ("pid" identification) configured by the FMZ dashboard, you can also set exchange configuration information that has not been configured to operate the bot {"eid": "OKEX", "pair": "ETH_BTC", "meta" :{"AccessKey": "xxx", "SecretKey": "yyy"}}, {"eid": "Huobi", "pair": "BCH_BTC", "meta" :{"AccessKey": "xxx", "SecretKey": "yyy"}} ] }Nota: Cuando utiliza la información confidencial, como la plataforma
API KEY, incluidos"meta":{"AccessKey":"xxx","SecretKey":"yyy"}en la configuración deeid, usted debe saber que FMZ no almacena los datos. Los datos serán enviados directamente al programa docker, por lo que esta información debe ser configurada cada vez que el bot se crea o se reinicia.Para reiniciar el bot que utiliza el complemento para apoyar el intercambio, al configurar el
SettingsParámetro, debe hacer las siguientes configuraciones para elexchangesel atributo:{"eid": "Exchange", "label" : "testXXX", "pair": "ETH_BTC", "meta" :{"AccessKey": "123", "SecretKey": "1234", "Front" : "http://127.0.0.1:6666/XXX"}}labelatributo es establecer una etiqueta para el objeto de intercambio accesado por el actualProtocolo general, que puede obtenerse mediante elexchange.GetLabel()El objetivo de la estrategia es:
-
-
Valor de retorno
{ "code": 0, "data": { // 1 means running "result": 1, "error": null } }
GetRobotDetail ((RobotId))
GetRobotDetail(RobotId)Obtiene la información detallada sobre el robot con el ID especificado (robotID: RobotId), correspondiente a laAPI KEYen la solicitud de la cuenta de la plataforma de negociación FMZ Quant.
-
Parámetro
RobotIdes de tipo entero; el robotIDpuede obtenerse medianteGetRobotList(...). -
Valor de retorno
{ "code": 0, "data": { "result": { "robot": { // Next payment time, namely the effective cut-off time after the current payment "charge_time": 1561992608, // Elapsed Time "charged": 3600, // Amount consumed (0.125 CNY = 12500000 / 1e8) "consumed": 12500000, "date": "2019-07-01 21:50:08", "debug": "{\"Nano\":1561989722431145193,\"Stderr\":\"\",\"Stdout\":\"\"}", // Stop time "end_time": "2019-07-01 22:02:02", // The docker ID assigned when the robot is running; if it is automatic, the value is -1 "fixed_id": 85960, "id": 150288, "is_deleted": 0, // Whether it has the permission to manage the bot "is_manager": true, // Whether it is virtual exchange "is_sandbox": 0, // Robot name "name": "Spread monitoring2", // Docker ID "node_id": 85960, // The exchange objects configured by the robot "pexchanges": { // 14703 is eid, and "GateIO" is exchange name "14703": "GateIO", "15445": "ZB", "42960": "OKEX", "44314": "Huobi" }, // label information of the exchange object configured by the robot "plabels": { "14703": "Gate.IO (old name: BTER)", "15445": "ZB", "42960": "OKEX spot V3 test", "44314": "Huobi - newest test" }, "profit": 0, // Whether to show public "public": 0, // Recent active time "refresh": 1561989724000, "robot_args": "[[\"TickInterval\",500],[\"StrOnePair\",\"spot:Huobi:spot;spot:OKEX:spot;false;60;5;0;0\"],[\"StrTwoPair\",\"spot:ZB:spot;spot:GateIO:spot;false;60;5;0;0\"],[\"StrThreePair\",\"null\"],[\"StrFourPair\",\"null\"],[\"StrSixPair\",\"null\"],[\"StrFivePair\",\"null\"],[\"ResetChart\",false]]", "start_time": "2019-07-01 22:00:54", // Robot status "status": 4, "strategy_args": "[[\"TickInterval\",\"Detection frequency (ms)\",\"This is millisecond. Don't set it too small.\",500],[\"StrOnePair\",\"Combination1\",\"Spread Combination\",\"spot:Huobi:spot;spot:OKCoin:spot;false;60;5;0;0\"],[\"StrTwoPair\",\"Combination2\",\"Spread Combination\",\"future:Futures_OKCoin:this_week;spot:OKCoin:spot;false;60;5;0;0\"],[\"StrThreePair\",\"Combination3\",\"Spread Combination\",\"future:Futures_OKCoin:this_week;future:Futures_OKCoin:quarter;true;60;5;0;0\"],[\"StrFourPair\",\"Combination4\",\"Spread Combination\",\"null\"],[\"StrSixPair\",\"Combination6\",\"Combination\",\"null\"],[\"StrFivePair\",\"Combination5\",\"Combination\",\"null\"],[\"ResetChart\",\"whether to clear the previous chart\",\"clear the previous chart\",false]]", // Configured exchange objects, set trading pair information "strategy_exchange_pairs": "[60,[44314,42960,15445,14703],[\"BTC_USDT\",\"BTC_USDT\",\"ETH_USDT\",\"ETH_USDT\"]]", // Strategy ID "strategy_id": 21337, // Strategy's last modification time "strategy_last_modified": "2018-11-29 12:07:58", // Strategy name "strategy_name": "Digital currency spread monitoring and analysis", "summary": "Polling time consuming: 500ms\n`[{\"type\":\"table\",\"title\":\"pair basic data\",\"cols\":[\"ID\",\"NameA - NameB\",\"SymbolA - SymbolB\",\"UpdCycle\",\"isUSD\",\"Collect\"],\"rows\":[[\"0 \",\"Huobi/OKEX\",\"spot/spot\",60,false,\"612ms\"],[\"1 \",\"ZB/GateIO\",\"spot/spot\",60,false,\"501ms\"]]},{\"type\":\"table\",\"title\":\"pair market data\",\"cols\":[\"ID\",\"NameA - NameB\",\"SymbolA - SymbolB\",\"A_Bids1\",\"B_Asks1\",\"Plus\",\"A_Asks1\",\"B_Bids1\",\"Minus\"],\"rows\":[[\"0 \",\"Huobi/OKEX\",\"spot/spot\",10518.02,10525.1,-7.08,10520,10523,-3],[\"1 \",\"ZB/GateIO\",\"spot/spot\",285.68,286,-0.32,285.8,285.85,-0.05]]},{\"type\":\"table\",\"title\":\"pair statistical data\",\"cols\":[\"ID\",\"NameA - NameB\",\"SymbolA - SymbolB\",\"Maximum spread\",\"Minimum spread\",\"Mean positive premium\",\"Mean negative premium\"],\"rows\":[[\"0 \",\"Huobi/OKEX\",\"spot/spot\",0,-3,0,-1.47],[\"1 \",\"ZB/GateIO\",\"spot/spot\",0.03,-0.05,0.03,-0.05]]}]`\n", // Whether to enable offline alert "wd": 0 } }, "error": null } }El
summarysi necesita más datos de información de la barra de estado, puede utilizar elGetRobotLogsInterfaz para obtener (cuandoGetRobotLogsObtiene la información de la barra de estado, el camposummaryes el último dato).La descripción del atributo de
strategy_exchange_pairs, por ejemplo, los siguientes datos:[60,[44314,42960,15445,14703],[\"BTC_USDT\",\"BTC_USDT\",\"ETH_USDT\",\"ETH_USDT\"]]Los primeros datos
60representa el período predeterminado de la línea K establecido por el bot es de 1 minuto, es decir, 60 segundos.[44314,42960,15445,14703]es el objeto de intercambioeidconfigurado para el bot (según el orden de adición).[\"BTC_USDT\",\"BTC_USDT\",\"ETH_USDT\",\"ETH_USDT\"]es el par de operaciones establecido para el objeto de intercambio configurado por el bot (en orden de suma y en correspondencia uno a uno coneid).
Obtener Cuenta
GetAccount()devuelve la información de la cuenta correspondiente a laAPI KEYen la solicitud de la cuenta de la plataforma de negociación FMZ Quant.
-
Parámetro No hay
-
Valor de retorno
{ "code": 0, "data": { "result": { "username": "littlelittledream", "level": 0, "consumed": 3235500000, "invitation_code": "1545967", "points": 25, // The value here, due to precision control, is expressed in integer. To convert it to actual value, you need to divide it by 1e8 (i.e. 10 to the 8th power), and the actual result here is: 65.421 "balance": 6542100000 }, "error": None } }
¿Qué quieres?
- ¿Hay ejemplos de combinación de macd en el diagrama de tiempo interno?
- ¡Pregúntenme cómo está la red de las API de los intercambios de monedas!
- Huobi reportó un error en el contrato
- ¿Pueden los administradores implementar el robot en la fundación de la nube de IBM gratis?
- Cómo instalar la base de datos de pandas en el administrador
- Comprobar los errores con el Exchange.IO
- Pregunta sobre el número de comandos bk, sk, etc. en my
- El problema de los indicadores del cinturón de Bryn
- ¿Cómo debo hacer el debugging si encuentro un error en los parámetros de la orden?
- Regreso de errores de datos personalizados
- ¿El IP del administrador está bloqueado y afecta el funcionamiento normal?
- ¿Por qué las líneas K de los futuros de OKex parecen estar obteniendo sólo 49 en estos días?
- La pregunta sobre cómo asignar la primera
- ¿Por qué no se puede acceder a los datos de K-Line de Binance?
- Prueba de nuevo si el origen de datos personalizados es compatible con otros intercambios
- La fórmula del indicador RSI que escribí, hay un error, por favor guíame.
- ¿Hay algún incidente que haya sido desencadenado en la transacción de la orden de compra de la moneda digital?
- Historia de los juegos de Binance
- ¿Se puede establecer dinámicamente el número de cuentas y monedas en la función init ()) al revisar?
- No se puede usar un contrato permanente