FMZ API インストラクション
作者: リン・ハーンゼロ, 作成日:2020年4月20日 10:19:00, 更新日:2023年4月12日 14:44:56// true
}
[http://underscorejs.org/](http://underscorejs.org/)
```js
function main() {
var sum = _.reduce([1, 2, 3], function(memo, num){return memo + num}, 0)
Log(sum)
}
C++図書館https://nlohmann.github.io/json/void main() { json table = R"({"type": "table", "title": "Position Information", "cols": ["Column1", "Column2"], "rows": [["abc", "def"], ["ABC", "support color #ff0000"]]})"_json; LogStatus("`" + table.dump() + "`"); LogStatus("Fist line message\n`" + table.dump() + "`\nThird line message"); json arr = R"([])"_json; arr.push_back(table); arr.push_back(table); LogStatus("`" + arr.dump() + "`"); table = R"({ "type" : "table", "title" : "Position Operation", "cols" : ["Column1", "Column2", "Action"], "rows" : [ ["abc", "def", {"type": "button", "cmd": "coverAll", "name": "close position"}] ] })"_json; LogStatus("`" + table.dump() + "`", "\n`" + R"({"type": "button", "cmd": "coverAll", "name": "close position"})"_json.dump() + "`"); }
タリブ図書館の機能指標
次の機能のパラメータは,Records[Close]入力 k ラインデータにおける閉じる価格を表します.Array()配列を表し,Array(outInteger)整数データの配列を返します.
呼び出しコードの例CCIインディケーター:
function main() {
var records = exchange.GetRecords()
var cci = talib.CCI(records, 14)
Log(cci)
}
import talib
def main():
records = exchange.GetRecords()
# the parameter "14" can be default
cci = talib.CCI(records.High, records.Low, records.Close, 14)
Log(cci)
void main() {
auto records = exchange.GetRecords();
auto cci = talib.CCI(records, 14);
Log(cci);
}
-
Pattern Recognition:インディケーター 記述 CDL2クラウズ 2 羽 の カラス CDL2CROWS ((記録[開く,高く,低く,閉じる]) =配列 (出) 整数) CDL3ブラッククロウズ 3 匹 の ブラック クロー CDL3BLACKCROWS ((記録[開く,高く,低く,閉じる]) =配列 ((outInteger) CDL3内側 3 内側 上下 CDL3INSIDE ((記録[開く,高く,低く,閉じる]) =配列 (出) 整数 CDL3ラインストライク 3 線 ストライク CDL3LINESTRIKE ((記録[開く,高く,低く,閉じる]) =配列 ((outInteger) CDL3外側 3 外側 上下 CDL3OUTSIDE ((レコード[開く,高く,低く,閉じる]) = 配列 ((outInteger) CDL3STARSINSOUTH (CDL3STARSINSOUTH) について 南部 の 三つ の 星 CDL3STARSINSOUTH ((記録[開く,高く,低く,閉じる]) =配列 (出) 整数) CDL3 ホワイトソルジャー 3 人 の 白 人 兵士 が 進ん で いる CDL3WHITESOLDIERS ((レコード[開く,高く,低く,閉じる]) =配列 (出) 整数 CDLABANDONEDBABY 試聴する 捨てられた赤ん坊 CDLABANDONEDBABY ((レコード[開く,高く,低く,閉じる],浸透 = 0.3) = アレイ ((outInteger) CDLADVANCEBLOCK 試聴する 先行ブロック CDLADVANCEBLOCK ((レコード[開く,高く,低く,閉じる]) = 配列 ((outInteger) CDLBELTHOLD について ベルトを握る CDLBELTHOLD ((レコード[開く,高く,低く,閉じ]) = 配列 (出) 整数 CDLBレイクアウト 脱退 CDLBREAKAWAY ((レコード[オープン,ハイ,ロー,クローズ]) = 配列 (outInteger) CDLCLOOSING マルーボズ マルボツを閉じる CDLCLOSINGMARUBOZU ((レコード[開く,高く,低く,閉じる]) =配列 ((outInteger) CDLCONCEALBABYSWALL 赤ちゃんを隠して 赤ちゃん の スロウウ を 隠す CDLCONCEALBABYSWALL ((レコード[開く,高く,低く,閉じる]) = 配列 ((outInteger) CDL対抗攻撃 逆襲 CDLCOUNTERATTACK ((記録[開く,高く,低く,閉じる]) =配列 ((outInteger) CDLDARKCLOUDCOVER 試聴する ダーク・クラウドカバー CDLDARKCLOUDCOVER ((レコード[オープン,ハイ,ロー,クローズ],浸透 = 0.5) = アレイ ((outInteger) CDLDOJI ドジ CDLDOJI ((記録[開く,高く,低く,閉じる]) = 配列 ((outInteger) CDLDOJISTAR について ドジスター CDLDOJISTAR ((レコード[開く,高く,低く,閉じる]) = 配列 (出) 整数) ドラゴンフライドジ 龍蝶 ドジ CDLDRAGONFLYDOJI ((記録[開く,高く,低く,閉じる]) =配列 ((outInteger) CDLENGULFING 飲み込める パターン CDLENGULFING ((レコード[Open,High,Low,Close]) = 配列 ((outInteger) CDLEVENINGDOJISTAR 試聴する 夕方のドジ星 CDLEVENINGDOJISTAR ((記録[開く,高く,低く,閉じる],浸透 = 0.3) = 配列 ((outInteger) CDLEVENINGSTAR 試聴する 夕星 CDLEVENINGSTAR ((レコード[開く,高く,低く,閉じる],浸透 = 0.3) = 配列 (outInteger) CDLGAPSIDESIDEホワイト 上下間隔の横の白い線 CDLGAPSIDESIDESWHITE ((記録[開く,高く,低く,閉じる]) =配列 (整数から) CDLグレーベストンドージー 墓石ドジ CDLGRAVESTONEDOJI ((記録[開く,高く,低く,閉じる]) =配列 ((outInteger) CDLHAMMER ハンマー CDLHAMMER ((記録[開く,高く,低く,閉じる]) = 配列 (出) 整数 CDランギングマン 絞首刑 CDLHANGINGMAN ((記録[開く,高く,低く,閉じる]) =配列 (出) 整数) CDLHARAMI ハラミパターン CDLHARAMI ((記録[開く,高く,低く,閉じる]) =配列 (出) 整数 CDLHARAMICROSS 細胞を分解する ハラミ・クロス・パターン CDLHARAMICROSS ((記録[開く,高く,低く,閉じる]) =配列 (出) 整数) CDLHIGHWAVE (ハイウェーブ) 高波のろうそく CDLHIGHWAVE ((記録[開く,高く,低く,閉じる]) = Array ((outInteger) CDLHIKKAKE (CDLHIKKAKE) について ヒッカケのパターン CDLHIKKAKE ((記録[開く,高く,低く,閉じる]) = 配列 (除き整数) CDLHIKKAKEMOD 試聴する 改造されたヒッカケパターン CDLHIKKAKEMOD ((レコード[オープン,ハイ,ロー,クローズ]) = 配列 ((outInteger) CDLHOMINGPIGEON オーブン オーブン 旅する鳩 CDLHOMINGPIGEON ((記録[開く,高く,低く,閉じる]) =配列 (出) 整数) CDLIDENTICAL3CROWS について 3 匹 の 同じ カラス CDLIDENTICAL3CROWS ((記録[開く,高く,低く,閉じる]) =配列 ((outInteger) CDLINNECK 首内型 CDLINNECK ((レコード[開く,高く,低く,閉じる]) = 配列 ((outInteger) CDLININVERTEDHAMMER 試聴する 逆向きのハンマー CDLINVERTEDHAMMER ((レコード[開く,高く,低く,閉じる]) = 配列 ((outInteger) CDLキッキング 蹴る CDLKICKING ((レコード[開く,高く,低く,閉じる]) = Array ((outInteger) CDLKICKKINGBYLENGTH (CDLキックキングビランス) 蹴る - 長いマルーボツによって決定される雄牛/熊 CDLKICKINGBYLENGTH ((レコード[開く,高く,低く,閉じる]) = 配列 ((outInteger) CDLLADDERBOTTOM について 階段の底 CDLLADDERBOTTOM ((記録[開く,高く,低く,閉じる]) =配列 (出) 整数) CDLLONGLEGGEDDOJI 試聴する 長い足のドジ CDLLONGLEGGEDDOJI ((記録[開く,高く,低く,閉じる]) =配列 ((outInteger) CDLLONGLINE ロングラインキャンドル CDLLONGLINE ((レコード[開く,高く,低く,閉じる]) = アレイ ((outInteger) CDLMMARUBOZU 試聴する マルボツー CDLMARUBOZU ((レコード[開く,高く,低く,閉じる]) =配列 ((outInteger) CDLMマッチングロー マッチングロー CDLMMATCHINGLOW ((レコード[オープン,ハイ,ロー,クローズ]) = 配列 (outInteger) CDLMATHOLD について マット・ホール CDLMATHOLD ((レコード[Open,High,Low,Close],Penetration = 0.5) = Array ((outInteger) ]は,この数値で表示されている. CDMORNINGDOJISTAR 試聴する 朝のドジスター CDLMORNINGDOJISTAR ((記録[開く,高く,低く,閉じる],浸透 = 0.3) = 配列 ((outInteger) CDLMORNINGSTAR 試聴する 朝の星 CDLMORNINGSTAR ((レコード[開く,高く,低く,閉じる],浸透 = 0.3) = 配列 ((outInteger) CDLONNECK 首 の パターン CDLONNECK ((レコード[オープン,ハイ,ロー,クローズ]) = 配列 (outInteger) CDLPIERCING (CDLPIERCING) について 穿刺 の パターン CDLPIERCING ((レコード[開く,高く,低く,閉じる]) = 配列 (出) 整数 CDLRICKSHAWMAN (CDリックスショーマン) リッカーの男 CDLRICKSHAWMAN ((記録[開く,高く,低く,閉じる]) =配列 (除き整数) CDLRISEFALL3 メソッド 上昇/減少 の 3 つの 方法 CDLRISEFALL3METHODS ((レコード[Open,High,Low,Close]) = 配列 (outInteger) 区切る線 区切り線 CDLSEPARATINGLINES ((レコード[開く,高く,低く,閉じる]) = 配列 ((outInteger) CDLSHOOTINGSTAR 試聴する 射星 CDLSHOOTINGSTAR ((レコード[開く,高く,低く,閉じる]) = 配列 ((outInteger) CDLSショートライン 短線キャンドル CDLSHORTLINE ((レコード[開く,高く,低く,閉じる]) = 配列 (出) 整数) CDL スピンニングトップ スピニングトップ CDLSPINNINGTOP ((記録[開く,高く,低く,閉じる]) =配列 (出) 整数) CDLSTALLED パターン 停滞したパターン CDLSTALLEDPATTERN ((レコード[Open,High,Low,Close]) = 配列 (outInteger) CDLSTICKSANDWICH について スティックサンドイッチ CDLSTICKSANDWICH ((レコード[オープン,ハイ,ロー,クローズ]) = 配列 ((outInteger) CDLTAKURI について タキュリ (非常に長い下影を持つドラゴンフライドジ) CDLTAKURI ((記録[開く,高く,低く,閉じる]) = 配列 (出) 整数) CDLTASUKIGAPについて タスキ・ギャップ CDLTASUKIGAP ((レコード[開く,高く,低く,閉じる]) = 配列 (出) 整数 CDLTHRUSTING について 推し込み パターン CDLTHRUSTING ((レコード[Open,High,Low,Close]) = Array ((outInteger) ] は,数列を表示している. CDLTRISTAR 薬剤について トリスターパターン CDLTRISTAR ((レコード[開く,高く,低く,閉じる]) = 配列 (出) 整数) CDLUNIQUE3リバー ユニーク3川 CDLUNIQUE3RIVER ((記録[開く,高く,低く,閉じる]) =配列 (出) 整数) CDLUPSIDEGAP2 クローズ 上向きのギャップ 2 カラス CDLUPSIDEGAP2CROWS ((レコード[開く,高く,低く,閉じる]) =配列 ((outInteger) CDLXSIDEGAP3方法について 上下差 3つの方法 CDLXSIDEGAP3METHODS ((レコード[Open,High,Low,Close]) = 配列 (outInteger) -
Volume Indicators:インディケーター 記述 AD チャイキン A/Dライン AD ((レコード[High,Low,Close,Volume]) = 配列 (outReal) ADOSC チャイキン A/D オシレーター ADOSC ((記録[High,Low,Close,Volume],Fast Period = 3,Slow Period = 10) = Array ((outReal) について) OBV 収支量について OBV ((記録[Close],記録[Volume]) = 配列 ((outReal) -
Math Transform:インディケーター 記述 ACOS ベクトル三角形 ACos ACOS ((記録[閉じる]) = 配列 ((outReal) ASIN ベクトル三角学ASin ASIN ((記録[閉じる]) = 配列 ((outReal) ATAN 矢量三角形 ATan ATAN ((記録[閉じる]) = アレイ ((outReal) CEIL ベクトル上限 CEIL ((記録[閉じる]) = 配列 ((outReal) コス ベクトル三角学 Cos COS ((記録[閉じる]) = 配列 ((outReal) コッシュ ベクトル三角学コッシュ コッシュ (COSH) レコード (Close) = アレイ (Array) アウトリアル EXP ベクトル算術 Exp EXP ((記録[閉じる]) = 配列 ((outReal) 床 ベクトルフロア FLOOR (FLOOR) 記録 (Close) = 配列 (Array) (outReal) LN ベクトルログ自然 LN ((記録[閉じる]) = 配列 ((outReal) LOG10 ベクトル ログ10 LOG10 ((記録[閉じる]) = 配列 ((outReal) SIN ベクトル三角形シーン SIN ((記録[閉じる]) = 配列 ((outReal) SINH ベクトル三角学シン SINH ((記録[閉じる]) = 配列 ((outReal) SQRT ベクトル平方根 SQRT ((記録[閉じる]) = 配列 ((outReal) TAN ベクトル三角学タン TAN ((記録[閉じる]) = 配列 ((outReal) TANH ベクトル三角体タン TANH (TANH) (記録) (閉じる) = 配列 (outReal) -
Math Operators:インディケーター 記述 マックス 指定された期間の最高値 MAX ((記録[閉じる],時間期間 = 30) = 配列 ((outReal) マキシンデックス 指定された期間の最高値のインデックス MAXINDEX ((記録[閉じる],時間期間 = 30) = 配列 ((outInteger) MIN 指定された期間の最低値 MIN ((記録[閉じる],時間期間 = 30) = 配列 ((outReal) MININDEX 特定期間の最低値のインデックス MININDEX ((記録[閉じる],時間期間 = 30) = 配列 ((outInteger) ミナックス 指定された期間中の最低値と最高値 MINMAX ((記録[閉じる],時間期間 = 30) = [配列 (outMin),配列 (outMax) ] ミンマックスインデックス 特定期間の最低値と最高値のインデックス MINMAXINDEX ((記録[閉じる],時間期間 = 30) = [配列 (minIdxから),配列 (maxIdxから) ] 総額 概要 SUM ((記録[閉じる],時間期間 = 30) = 配列 ((outReal) -
Cycle Indicators:インディケーター 記述 HT_DCPERIOD ヒルバート変換 - 主要サイクル期 HT_DCPERIOD ((レコード[閉じる]) = 配列 ((outReal) HT_DCPHASE ヒルバート変換 - 主要サイクル段階 HT_DCPHASE ((記録[閉じる]) = 配列 ((outReal) HT_PHASOR ヒルベルト変換 - ファソール構成要素 HT_PHASOR (記録[閉じる]) = [配列 (外) InPhase,配列 (外) Quadrature] HT_SINE ヒルベルト変換 - シネウェーブ HT_SINE ((記録[閉じる]) = [配列 ((外Sine),配列 ((外LeadSine) ] HT_TRENDMODE について ヒルバート変換 - トレンド対サイクルモード HT_TRENDMODE ((記録[閉じる]) = 配列 ((outInteger) -
Volatility Indicators:インディケーター 記述 ATR 平均的な実範囲 ATR ((記録[High,Low,Close],Time Period = 14) = Array ((outReal) ]は,この数列を表示する NATR 標準化された平均真域 NATR ((記録[High,Low,Close],Time Period = 14) = Array ((outReal) ] は,この数列を表示する数値で, トランゲ 真の範囲 この数列は,数列の列で,数列の列で,数列の列で, -
Overlap Studies:インディケーター 記述 BBBAND ボリンジャー・バンド BBANDS ((記録[閉じる],時間期 = 5,上向き = 2,下向き = 2,MAタイプ = 0) = [配列 (realUpperBand外),配列 (realMiddleBand外),配列 (realLowerBand外) ] DEMA 2倍指数関数移動平均 DEMA ((記録[閉じる],時間期間 = 30) = 配列 ((outReal) エイマ 指数関数移動平均 EMA (記録 (閉じる) 期間 = 30) = 配列 (outReal) HT_TRENDLINE ヒルベルト変換 - 即時のトレンドライン HT_TRENDLINE ((記録[閉じる]) = 配列 ((outReal) カマ カウフマンの適応移動平均 KAMA ((記録[閉じる],時間期間 = 30) = 配列 ((outReal) マルチ 移動平均 MA ((記録[閉じる],時間期間 = 30,MA タイプ = 0) = 配列 ((outReal) ママ MESA アダプティブ移動平均 MAMA ((記録[閉じる],Fast Limit = 0.5,Slow Limit = 0.05) = [配列 (outMAMA),配列 (outFAMA) ] 中間点 期間の中間点 MIDPOINT (ミッドポイント) レコード (クローズ) タイム・ペリオド (時間) = 14 = アレイ (outReal) 中間価格 期間の中点価格 MIDPRICE ((記録[High,Low],時間期間=14) = 配列 ((outReal) SAR パラボリック SAR SAR ((記録[High,Low],加速因数 = 0.02,AF 最大 = 0.2) = 配列 ((outReal) SAREXT パラボリック SAR - 拡張 SAREXT ((記録[High,Low],スタート値 = 0,逆向きのオフセット = 0,AF インット ロング = 0.02,AF ロング = 0.02,AF マックス ロング = 0.2,AF インット ショート = 0.02,AF ショート = 0.02,AF マックス ショート = 0.2) = アレイ ((outReal) SMA 単純な移動平均 SMA ((記録[閉じる],時間期間 = 30) = 配列 ((outReal) T3 3倍指数関数移動平均 (T3) T3 ((記録[閉じる],時間帯 = 5,ボリュームファクター = 0.7) = 配列 ((outReal) TEMA について 3倍指数関数移動平均 TEMA (TEMA) 記録 (TEMA) 記録 (TEMA) 記録 (TEMA) 記録 (TEMA) 記録 (TEMA) 記録 (TEMA) トリマ 三角形の移動平均 TRIMA ((記録[閉じる],時間期間 = 30) = 配列 ((outReal) WMA 引く引く平均値 WMA ((記録[閉じる],時間期間 = 30) = 配列 ((outReal) -
Statistic Functions:インディケーター 記述 LINEARREG 線形回帰 LINEARREG ((レコード[Close],タイムピリオド = 14) = アレイ ((outReal) LINEARREG_ANGLE (線形_角) 線形回帰角 LINEARREG_ANGLE ((記録[閉じる],時間期間 = 14) = 配列 ((outReal) LINEARREG_INTERCEPT は,このコードを表示する. 線形回帰インターセプト LINEARREG_INTERCEPT ((記録[閉じる],時間期間 = 14) = 配列 ((outReal) LINEARREG_SLOPE について 線形回帰傾き LINEARREG_SLOPE ((記録[閉じる],時間期間 = 14) = 配列 ((outReal) STDDEV 標準偏差 STDDEV (STDDEV) 記録 (Close) 期間 = 5,偏差 = 1) = 配列 (Array) (outReal) TSF タイム シリーズ 予測 TSF ((記録[閉じる],時間期間 = 14) = 配列 ((outReal) VAR バランス VAR ((記録[閉じる],時間期間 = 5,偏差 = 1) = 配列 ((outReal) -
Momentum Indicators:インディケーター 記述 ADX 平均方向動向指数 ADX ((記録[High,Low,Close],Time Period = 14) = Array ((outReal) ]は,この数列を表示する数値で, ADXR 平均方向動向指数ランキング ADXR ((記録[High,Low,Close],Time Period = 14) = Array ((outReal) ]は,この数列を表示する数値で, APO 絶対価格オシレーター APO ((記録[閉じる],Fast Period = 12,Slow Period = 26,MA タイプ = 0) = Array ((outReal) アローン アルーン AROON ((記録[High,Low],Time Period = 14) = [配列 (outAroonDown),配列 (outAroonUp) ] アロノス アルーン振動器 AROONOSC ((記録[High,Low],時間期間=14) =配列 (outReal) BOP 権力 の 均衡 BOP ((記録[オープン,ハイ,ロー,クローズ]) = 配列 (outReal) CCI 商品チャネル指数 CCI ((記録[High,Low,Close],Time Period = 14) = Array ((outReal) ] は,この数列を表示する. CMO チャンデ・モメント・オシレーター CMO ((記録[閉じる],時間期間 = 14) = 配列 ((outReal) DX 方向移動指数 DX ((記録[High,Low,Close],Time Period = 14) = Array ((outReal) ]は,この数列を表示する数列を表示しています. マックド 移動平均収束/離散 MACD ((記録[閉じる],Fast Period = 12,Slow Period = 26,Signal Period = 9) = [配列 (outMACD),配列 (outMACDSignal),配列 (outMACDHist) ] MACDEXT 制御可能なMA型MACD MACDEXT ((記録[閉じる],Fast Period = 12,Fast MA = 0,Slow Period = 26,Slow MA = 0,Signal Period = 9,Signal MA = 0) = [配列 (outMACD),配列 (outMACDSignal),配列 (outMACDHist) ] MACDFIX 移動平均収束/離散修正 12/26 MACDFIX ((記録[閉じる],シグナル期間 = 9) = [配列 (outMACD),配列 (outMACDSignal),配列 (outMACDHist) ] MFI 貨幣流量指数 MFI ((レコード[High,Low,Close,Volume],Time Period = 14) = Array ((outReal) ] は,MFI (金融機関) の記録を表示している. MINUS_DI マイナス方向指示 この数列は,数列の内側にある数列を表示します. MINUS_DM マイナス方向移動 記録数 (High,Low),時間帯 = 14) = 配列 (Array) (outReal) お母さん 勢い MOM (MOM) (記録) (閉じる) (閉じる) (閉じる) (閉じる) (閉じる) (閉じる) PLUS_DI プラス方向指示 PLUS_DI ((記録[High,Low,Close],Time Period = 14) = Array ((outReal) について) PLUS_DM プラス方向移動 PLUS_DM ((レコード[High,Low],Time Period = 14) = Array ((outReal) について) PPO % 価格オシレーター PPO ((記録[閉じる],Fast Period = 12,Slow Period = 26,MA Type = 0) = Array ((outReal) について ROC 変化率: ((価格/前価格) -1) *100 ROC ((記録[閉じる],時間期間 = 10) = 配列 ((outReal) ROCP 変化率 % (価格前) /価格前 ROCP ((記録[閉じる],時間期間 = 10) = 配列 ((outReal) ROCR 変化率比: (価格/前価格) ROCR ((記録[閉じる],時間期間 = 10) = 配列 ((outReal) ROCR100 変化率比100スケール: (価格/前価格) *100 ROCR100 ((記録[閉じる],時間期間 = 10) = 配列 ((outReal) RSI 相対強度指数 RSI (記録[閉じる],時間期間 = 14) = 配列 (outReal) ストック ストカスティック STOCH ((記録[High,Low,Close],Fast-K Period = 5,Slow-K Period = 3,Slow-K MA = 0,Slow-D Period = 3,Slow-D MA = 0) = [Array ((outSlowK),Array ((outSlowD) ] STOCHF ストカスティック・ファスト STOCHF ((記録[High,Low,Close],Fast-K Period = 5,Fast-D Period = 3,Fast-D MA = 0) = [Array ((outFastK),Array ((outFastD) ] ストックルシ ストカスティック相対強度指数 STOCHRSI (記録を閉じる) タイムピリオド = 14,Fast-Kピリオド = 5,Fast-Dピリオド = 3,Fast-DMA = 0) = [配列 (outFastK),配列 (outFastD) ] トリックス 1日間の変化率 (ROC) の3回間スムーズEMA TRIX ((記録[閉じる],時間期間 = 30) = 配列 ((outReal) ULTOSC 究極のオシレーター ULTOSC ((記録[High,Low,Close],第1期=7,第2期=14,第3期=28) =配列 (outReal) WILLR ウィリアムズ %R WILLR ((記録[High,Low,Close],Time Period = 14) = Array ((outReal) ] は,この数列を表示しています. -
Price Transform:インディケーター 記述 AVGPRICE 平均価格 AVGPRICE ((記録[開く,高く,低く,閉じる]) =配列 (outReal) 価格について 中間価格 MEDPRICE ((記録[High,Low]) = 配列 (outReal) 種類価格 典型的な価格 TYPPRICE ((レコード[High,Low,Close]) = アレイ (outReal) WCLPRICE 重要度の高い閉店価格 WCLPRICE ((記録[High,Low,Close]) = 配列 (outReal)
基本データ
FMZ Quant Tradingプラットフォームは,ボット内のさまざまな基本データをバックテストし,クエリをサポートしています. FMZ Quant Tradingプラットフォームのデータセンターによってリアルタイムで基本的なデータが提供され,データセンターはさまざまな基本データを収集し,要約し続けます.
データ呼び出し
使用exchange.GetData(Source)基本データを取得する機能です
暗号通貨の基本データは一時的に収集されていません
データ形式
暗号通貨の基本データは一時的に収集されていません
FMZプラットフォームのAPI拡張
FMZ Quant Tradingプラットフォームは,プラットフォームのさまざまな機能のプログラムによる呼び出しをサポートし,拡張されたAPIを開設しました.
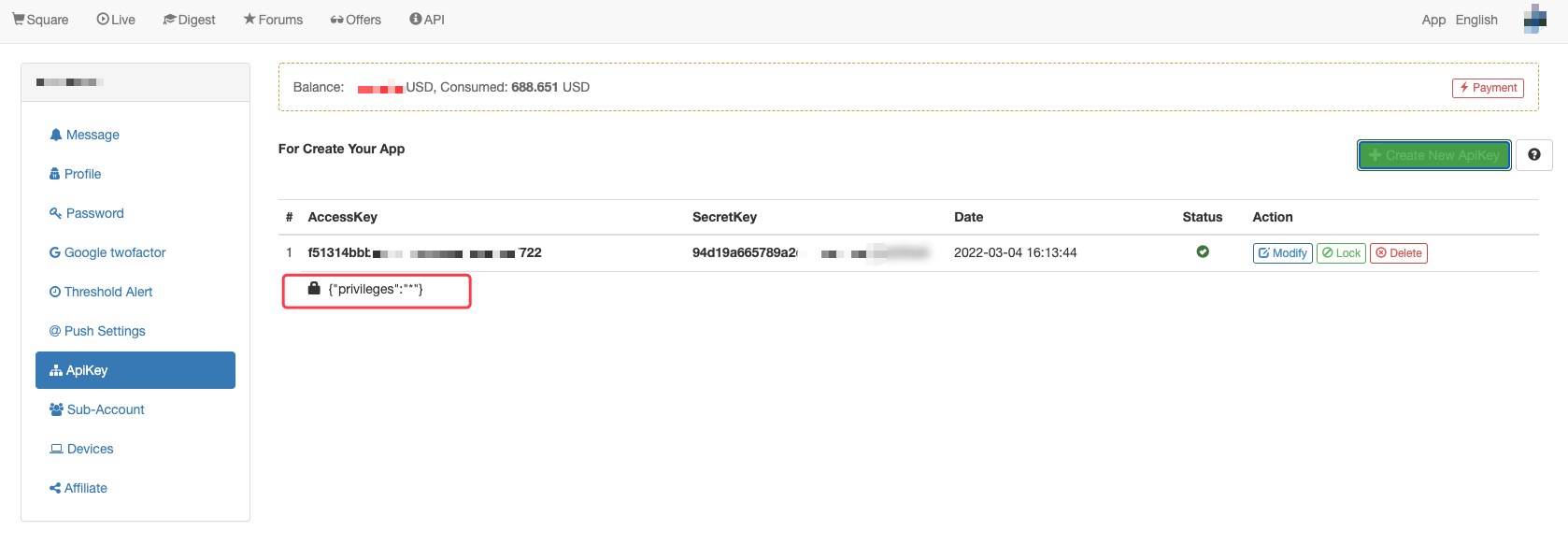
図のように API 権限管理拡張をサポートします.
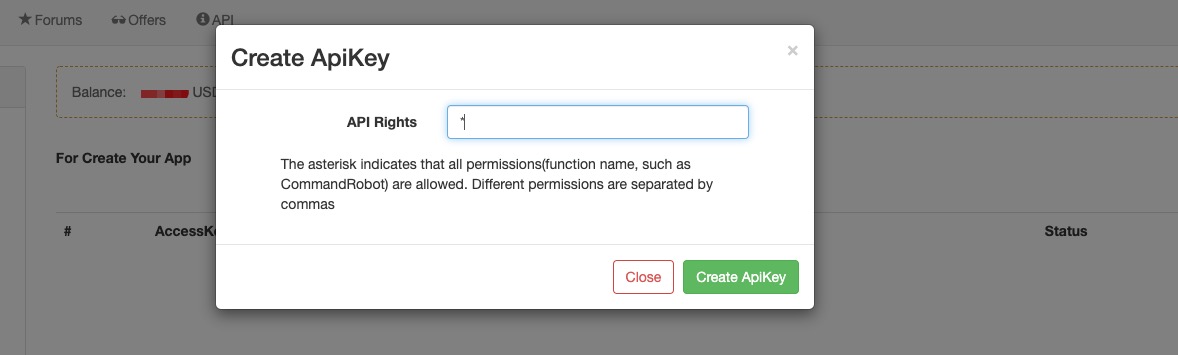
新たに追加されたAPI KEYすべての許可を取得します.あなたは入力することができます*すべてのインターフェースの権限を開くため,API 権限入力ボックスに指定します.特定のインターフェースの権限を指定し,コンマで区切られた対応する拡張 API 機能名を入力します.GetRobotDetail, DeleteRobotほら これAPI KEY許可をロボットのインターフェースを詳細な情報を取得そしてボットインターフェースを削除.
ApiKey を作成する
API 返却コード
| 記述 | コード |
|---|---|
| 実行が成功 | 0 |
| 誤った API キー | 1 |
| 誤った署名 | 2 |
| ノンセエラー | 3 |
| 誤った方法 | 4 |
| 誤ったパラメータ | 5 |
| 内部の未知のエラー | 6 |
ボットの状態
(通常のスタート)
| ステータス | コード |
|---|---|
| 無効 | 0 |
| 稼働中 | 1 |
| 停止する | 2 |
| 終了しました | 3 |
| 停止しました | 4 |
| 戦略には誤りがある | 5 |
(異常)
| ステータス | コード |
|---|---|
| ストラテジーは期限切れです. また購入するには,ライターに連絡してください. | -1 |
| ドッカーが見つかりませんでした. | -2 |
| 戦略のコンパイルエラー | -3 |
| ロボットは既に動いています. | -4 |
| バランスが不十分 | -5 |
| 同期戦略の数が制限を上回る | -6 |
検証方法
トークン 検証
使用md5確認する暗号化方法
Python,Golang言語の呼び出し例:
#!/usr/bin/python
# -*- coding: utf-8 -*-
import time
import json
import ssl
ssl._create_default_https_context = ssl._create_unverified_context
try:
import md5
import urllib2
from urllib import urlencode
except:
import hashlib as md5
import urllib.request as urllib2
from urllib.parse import urlencode
accessKey = 'f27bfcXXXXXXXX013c62e98XXXXX817a'
secretKey = 'ffeXXXXXXXX085ff7269XXXXXXXX6f82'
def api(method, *args):
d = {
'version': '1.0',
'access_key': accessKey,
'method': method,
'args': json.dumps(list(args)),
'nonce': int(time.time() * 1000),
}
d['sign'] = md5.md5(('%s|%s|%s|%d|%s' % (d['version'], d['method'], d['args'], d['nonce'], secretKey)).encode('utf-8')).hexdigest()
# Note: for the timeout problem of "urllib2.urlopen" function, you can set the timeout time; for example, urllib2.urlopen ('https://www.fmz.com/api/v1', urlencode(d).encode('utf-8'), timeout = 10), that is, set timeout for 10 seconds
return json.loads(urllib2.urlopen('https://www.fmz.com/api/v1', urlencode(d).encode('utf-8')).read().decode('utf-8'))
# Return the docker list
print(api('GetNodeList'))
# Return the exchange list
print(api('GetPlatformList'))
# GetRobotList (offset, length, robotStatus, label); passing "-1" means obtaining all
print(api('GetRobotList', 0, 5, -1, 'member2'))
# CommandRobot(robotId, cmd) sends commands to the bot
print(api('CommandRobot', 123, 'ok'))
# StopRobot(robotId) returns the bot status code
print(api('StopRobot', 123))
# RestartRobot(robotId) returns the bot status code
print(api('RestartRobot', 123))
# GetRobotDetail(robotId) returns detailed bot information
print(api('GetRobotDetail', 123))
package main
import (
"fmt"
"time"
"encoding/json"
"crypto/md5"
"encoding/hex"
"net/http"
"io/ioutil"
"strconv"
"net/url"
)
// Fill in your own FMZ platform api key
var apiKey string = ""
// Fill in your own FMZ platform secret key
var secretKey string = ""
var baseApi string = "https://www.fmz.com/api/v1"
func api(method string, args ... interface{}) (ret interface{}) {
// Process args
jsonStr, err := json.Marshal(args)
if err != nil {
panic(err)
}
params := map[string]string{
"version" : "1.0",
"access_key" : apiKey,
"method" : method,
"args" : string(jsonStr),
"nonce" : strconv.FormatInt(time.Now().UnixNano() / 1e6, 10),
}
data := fmt.Sprintf("%s|%s|%s|%v|%s", params["version"], params["method"], params["args"], params["nonce"], secretKey)
h := md5.New()
h.Write([]byte(data))
sign := h.Sum(nil)
params["sign"] = hex.EncodeToString(sign)
// http request
client := &http.Client{}
// request
urlValue := url.Values{}
for k, v := range params {
urlValue.Add(k, v)
}
urlStr := urlValue.Encode()
request, err := http.NewRequest("GET", baseApi + "?" + urlStr, nil)
if err != nil {
panic(err)
}
resp, err := client.Do(request)
if err != nil {
panic(err)
}
defer resp.Body.Close()
b, err := ioutil.ReadAll(resp.Body)
if err != nil {
panic(err)
}
ret = string(b)
return
}
func main() {
settings := map[string]interface{}{
"name": "hedge test",
"strategy": 104150,
// K-line period parameter "60" means 60 seconds
"period": 60,
"node" : 73938,
"appid": "member2",
"exchanges": []interface{}{
map[string]interface{}{
"eid": "Exchange",
"label" : "test_bjex",
"pair": "BTC_USDT",
"meta" : map[string]interface{}{
// Fill in the access key
"AccessKey": "",
// Fill in the secret key
"SecretKey": "",
"Front" : "http://127.0.0.1:6666/exchange",
},
},
},
}
method := "RestartRobot"
fmt.Println("Call interface:", method)
ret := api(method, 124577, settings)
fmt.Println("main ret:", ret)
}
直接確認
確認をサポートしますtoken(合格)secret_key直接アクセスできる URL を生成できます.例えば,ボットに直接インタラクティブな指示を与える URL は,TradingViewまたはWebHook他のケースでは呼び戻しです
についてCommandRobot(RobotId, Cmd)パラメータnonce確認を必要とせず,インターフェイスへのアクセス頻度と訪問時間は制限されません.
https://www.fmz.com/api/v1?access_key=xxx&secret_key=yyyy&method=CommandRobot&args=[186515,"ok12345"]
直接の検証が支持されている場合CommandRobotインターフェースがサポートされていますBody設定を表示します.WebHook URLについてTradingView:
https://www.fmz.com/api/v1?access_key=fd3be82e9e6e6ed4439f2793a5e9ca&secret_key=520b9f10f3768e6ad1af59ff25184&method=CommandRobot&args=[130350,+""]
次の形式に従って設定に注意してください:args=[130350,+""], その中で130350ロボットか?IDFMZ 量子取引プラットフォームの
メッセージボックス内の設定 (送信される要求された"Body"データ):
-
JSON 形式:
{"close": {{close}}, "name": "aaa"}ロボットと
IDについて186515インタラクティブな指示を受けることができます.{"close": 39773.75, "name": "aaa"}. -
テキスト形式:
BTCUSDTPERP Crossing 39700.00 close: {{close}}ロボットと
IDについて186515インタラクティブな指示を受けることができます.BTCUSDTPERP Crossing 39700.00 close: 39739.4.
例としてPython & Golang言語の呼び出し:
#!/usr/bin/python
# -*- coding: utf-8 -*-
import json
import ssl
ssl._create_default_https_context = ssl._create_unverified_context
try:
import urllib2
except:
import urllib.request as urllib2
accessKey = 'your accessKey'
secretKey = 'your secretKey'
def api(method, *args):
return json.loads(urllib2.urlopen(('https://www.fmz.com/api/v1?access_key=%s&secret_key=%s&method=%s&args=%s' % (accessKey, secretKey, method, json.dumps(list(args)))).replace(' ', '')).read().decode('utf-8'))
# If APIKEY does not have the interface permission, the call to print(api('RestartRobot', 130350)) will fail, and the returned data is: {'code': 4, 'data': None}
# print(api('RestartRobot', 130350))
# Print bot details with ID 130350
print(api('GetRobotDetail', 130350))
package main
import (
"fmt"
"encoding/json"
"net/http"
"io/ioutil"
"net/url"
)
// Fill in your own FMZ platform api key
var apiKey string = "your access_key"
// Fill in your own FMZ platform secret key
var secretKey string = "your secret_key"
var baseApi string = "https://www.fmz.com/api/v1"
func api(method string, args ... interface{}) (ret interface{}) {
jsonStr, err := json.Marshal(args)
if err != nil {
panic(err)
}
params := map[string]string{
"access_key" : apiKey,
"secret_key" : secretKey,
"method" : method,
"args" : string(jsonStr),
}
// http request
client := &http.Client{}
// request
urlValue := url.Values{}
for k, v := range params {
urlValue.Add(k, v)
}
urlStr := urlValue.Encode()
request, err := http.NewRequest("GET", baseApi + "?" + urlStr, nil)
if err != nil {
panic(err)
}
resp, err := client.Do(request)
if err != nil {
panic(err)
}
defer resp.Body.Close()
b, err := ioutil.ReadAll(resp.Body)
if err != nil {
panic(err)
}
ret = string(b)
return
}
func main() {
method := "GetRobotDetail"
fmt.Println("Call interface:", method)
ret := api(method, 130350)
fmt.Println("main ret:", ret)
}
拡張APIの説明
-
FMZ Quant トレーディングプラットフォームの拡張API
https://www.fmz.com/api/v1?上記の記号
?要求パラメータが続きます.要求パラメータは
Python言語:{ 'version' : '1.0', # Access key, applied on the account management page 'access_key': '8a1f6c3785fd78a1848320e0b19js99f', # The specific method called 'method' : 'GetNodeList', # The parameter list of specific method algorithm 'args' : [], # Timestamp, in the unit of millisecond, is allowed to have 1 hour of time error both before and after the standard timestamp;the nonce must be greater than the nonce value of the last access 'nonce' : 1516292399361, # Signature 'sign' : '085b63456c93hfb243a757366600f9c2' }各パラメータ名は文字で区切られています.
&パラメータの名前と値は,シンボルと関連しています=. 完全な要求 URL (取っmethod=GetNodeList例として):https://www.fmz.com/api/v1? access_key=8a1f6c3785fd78a1848320e0b19js99f& nonce=1516292399361& args=%5B%5D& sign=085b63456c93hfb243a757366600f9c2& version=1.0& method=GetNodeList注意してください.
secret_key要求パラメータの間で -
署名方法 要求パラメータでは,パラメータ
sign暗号化された文字列で 暗号化方法は次のとおりですフォーマットによると:
version + "|" + method + "|" + args + "|" + nonce + "|" + secretKey文字列を連結した後,MD5文字列を暗号化し,それを十六進数値のデータ文字列値に変換する暗号化アルゴリズム,パラメータの値に言及
sign.参照
Python署名部分のコード:# parameter d = { 'version': '1.0', 'access_key': accessKey, 'method': method, 'args': json.dumps(list(args)), 'nonce': int(time.time() * 1000), } # Calculate "sign" signature (encrypted) d['sign'] = md5.md5(('%s|%s|%s|%d|%s' % (d['version'], d['method'], d['args'], d['nonce'], secretKey)).encode('utf-8')).hexdigest()
GetNodeList (ノードリスト取得)
GetNodeList()FMZ Quant トレーディング プラットフォームアカウントのドッカーリストを返します.API KEY要求書に
-
パラメーター ない
-
返金値
{ "code": 0, "data": { "result": { "nodes": [{ // Version number "build": "3.3", "date": "2018-01-19 10:35:24", "id": 34500, "ip": "126.28.21.120", // Number of the bots running on this docker "loaded": 1, "name": "iZ9116xhkgtZ", // Whether online "online": true, // Operation system "os": "linux", // Whether to enable offline alert "wd": 0 }, ... ] }, "error": null } }
GetRobotGroupList (ロボットグループリスト)
GetRobotGroupList()FMZ Quant トレーディング プラットフォームアカウントのボットグループリストを返します.API KEY要求書に
-
パラメーター ない
-
返金値
{ "code":0, "data":{ "result":{ // All bot grouping information: group ID, group name "items":[{"id":1122,"name":"test"}] }, "error":null } }
GetPlatformList (プラットフォームリスト取得)
GetPlatformList()FMZ Quant トレーディング プラットフォームアカウントによって追加された取引所のリストを返します.API KEY要求書に
-
パラメーター ない
-
返金値
{ "code": 0, "data": { "result": { "platforms": [{ "eid": "Huobi", "id": 12483, // The label when adding a platform "label": "huobi - test ETH/ETC", "logo": "huobi.png", "name": "huobi", "stocks": ["LTC_BTC", "ETH_BTC", "ETC_BTC", "BCH_BTC"], "website": "https://www.huobi.pro/" }, { "eid": "AEX", "id": 16345, "label": "AEX", "logo": "", "name": "AEX", "stocks": ["LTC_BTC", "ETH_BTC", "ETC_BTC", "BCC_BTC"], "website": "https://www.aex.com/" }, ... ] }, "error": null } }
GetRobotList (ロボットリスト)
GetRobotList(offset, length, robotStatus, label)FMZ Quant トレーディング プラットフォームアカウントのロボットリストを返します.API KEY要求書に
-
パラメーター
offset,lengthそしてrobotStatus整数型であり,label文字列のタイプですoffsetlengthrobotStatus(-1 を合格すると全部取得する) label(カスタムラベル,ラベルを持つすべてのボットがフリートできます)
について
Pythonコード例は上記を参照してください.検証方法 - トークン検証そして次のとおりですPython呼び出しの例:print api('GetRobotList', 'member2')カスタムラベルですべてのロボットの情報を印刷member2.print api('GetRobotList', 0, 5, -1, 'member2')0 から 5 ページまで並べて,最大 5 ロボットにmember2. -
返金値
{ "code": 0, "data": { "result": { "all": 53, "bots": [{ "date": "2017-12-25 09:29:27", "end_time": "2017-12-28 17:44:21", "id": 66054, // If the value is 1, the bot is a virtual platform bot "is_sandbox": 1, "name": "C++ test strategy", "node_guid": "705d9aaaaaaaa93b49baaaaa787581cb087", "profit": 0, "public": 0, "refresh": 151345645647000, "start_time": "2017-12-28 17:44:15", "status": 3, "strategy_id": 65365, "strategy_isowner": true, "strategy_name": "C++ Version Docker API Test Strategy(cryptocurrency futures and spot markets)", "wd": 0 }, ... ] }, "error": null } }
コマンドロボット
CommandRobot(RobotId, Cmd)インタフェースは,対応するロボット (ロボット) にインタラクティブなコマンドを送信します.ID: RobotId) についてAPI KEYFMZ Quant アカウントのリクエスト (インタラクティブなコマンドはGetCommand()API は戦略を呼び出し,返却します.
-
パラメーター
RobotId整数型である botID;Cmdインタラクティブなコマンドをボットに送りますRobotIdロボットID取得することができる.GetRobotList(...)interface.Cmdボットに送信されるインタラクティブなコマンドです.コマンドは関数によってキャプチャされます.GetCommand()戦略におけるインタラクティブ・ロジック (戦略におけるインタラクティブ・ロジックを実現するには,GetCommand()ファイル内の機能)
-
返金値
{ // The API request was successfully executed "code": 0, "data": { // However, sending a command to a bot that is not running returns failure "result": false, "error": null } }
ロボット (robotId)
StopRobot(RobotId)指定ID (robot) のボットを実行するのを停止します.ID: RobotId) に対応するAPI KEYFMZ Quantアカウントの要求に
-
パラメーター
RobotId整数型である botID, を得ることができるGetRobotList(...)インターフェースStopRobot(RobotId)インターフェースは停止したロボットの状態コードを返します -
返金値
{ "code": 0, "data": { // 2 means stopping "result": 2, "error": null } }
ロボットを再起動します.
RestartRobot(RobotId, Settings)ロボットを指定ID (ロボット) で再起動しますID: RobotId) に対応するAPI KEYFMZ Quantアカウントの要求に
ロボットが拡張APIで作成された場合,拡張APIはRestartRobot (RobotId, Settings)再起動するために使用する必要があります.Settingsパラメーターは渡す必要があります.
拡張 API を介して再起動したり,ページのボタンをクリックしたりできます.Settingsパラメータ,または単に渡すRobotIdパラメーター.RobotIdパラメーター,現在のボット設定に従ってボットを起動します.
-
パラメーター
-
ロボットを設定せずに,戦略パラメータ
Settings:RobotId整数型である.ロボットID取得できるのは,GetRobotList(...). -
ロボットを設定すると,戦略パラメータ
Settings:RobotId整数型で,ボットID取得できるのは,GetRobotList(...).SettingsはJSONオブジェクトタイプSettingsパラメータフォーマット:Settings = { "name": "hedge test", // Strategy parameter "args": [["Interval", 500]], // Strategy ID, which can be obtained with "GetStrategyList" method "strategy": 25189, // K-line period parameter "60" means 60 seconds "period": 60, // Specify on which docker to run; if the attribute is not written, it will be automatically assigned to run "node" : 51924, // Custom field "appid": "member2", "exchanges": [ // ZB; "pid" can be obtained by "GetPlatformList" method {"pid": 15445, "pair": "ETH_BTC"}, // OKEX; 2 exchange objects are configured {"pid": 13802, "pair": "BCH_BTC"}, // In addition to the platforms ("pid" identification) configured by the FMZ dashboard, you can also set exchange configuration information that has not been configured to operate the bot {"eid": "OKEX", "pair": "ETH_BTC", "meta" :{"AccessKey": "xxx", "SecretKey": "yyy"}}, {"eid": "Huobi", "pair": "BCH_BTC", "meta" :{"AccessKey": "xxx", "SecretKey": "yyy"}} ] }注記: 機密情報を利用する際には
API KEY含めて"meta":{"AccessKey":"xxx","SecretKey":"yyy"}配置でeidFMZはデータを保存しないので,この情報はボットが作成されたり,再起動されたりするたびに設定する必要があります.交換をサポートするためにプラグインを使用するボットを再起動するには,設定するときに
Settingsパラメータ,あなたは次の設定を行う必要がありますexchanges属性:{"eid": "Exchange", "label" : "testXXX", "pair": "ETH_BTC", "meta" :{"AccessKey": "123", "SecretKey": "1234", "Front" : "http://127.0.0.1:6666/XXX"}}label交換オブジェクトのラベルを設定します.一般議定書取得することができる.exchange.GetLabel()戦略における役割です
-
-
返金値
{ "code": 0, "data": { // 1 means running "result": 1, "error": null } }
ロボット詳細を入手する
GetRobotDetail(RobotId)ロボットに関する詳細な情報を指定ID (ロボット) で取得しますID: RobotId) に対応するAPI KEYFMZ Quant トレーディング プラットフォームのアカウントの要求で
-
パラメーター
RobotId整数型である.ロボットID取得できるのは,GetRobotList(...). -
返金値
{ "code": 0, "data": { "result": { "robot": { // Next payment time, namely the effective cut-off time after the current payment "charge_time": 1561992608, // Elapsed Time "charged": 3600, // Amount consumed (0.125 CNY = 12500000 / 1e8) "consumed": 12500000, "date": "2019-07-01 21:50:08", "debug": "{\"Nano\":1561989722431145193,\"Stderr\":\"\",\"Stdout\":\"\"}", // Stop time "end_time": "2019-07-01 22:02:02", // The docker ID assigned when the robot is running; if it is automatic, the value is -1 "fixed_id": 85960, "id": 150288, "is_deleted": 0, // Whether it has the permission to manage the bot "is_manager": true, // Whether it is virtual exchange "is_sandbox": 0, // Robot name "name": "Spread monitoring2", // Docker ID "node_id": 85960, // The exchange objects configured by the robot "pexchanges": { // 14703 is eid, and "GateIO" is exchange name "14703": "GateIO", "15445": "ZB", "42960": "OKEX", "44314": "Huobi" }, // label information of the exchange object configured by the robot "plabels": { "14703": "Gate.IO (old name: BTER)", "15445": "ZB", "42960": "OKEX spot V3 test", "44314": "Huobi - newest test" }, "profit": 0, // Whether to show public "public": 0, // Recent active time "refresh": 1561989724000, "robot_args": "[[\"TickInterval\",500],[\"StrOnePair\",\"spot:Huobi:spot;spot:OKEX:spot;false;60;5;0;0\"],[\"StrTwoPair\",\"spot:ZB:spot;spot:GateIO:spot;false;60;5;0;0\"],[\"StrThreePair\",\"null\"],[\"StrFourPair\",\"null\"],[\"StrSixPair\",\"null\"],[\"StrFivePair\",\"null\"],[\"ResetChart\",false]]", "start_time": "2019-07-01 22:00:54", // Robot status "status": 4, "strategy_args": "[[\"TickInterval\",\"Detection frequency (ms)\",\"This is millisecond. Don't set it too small.\",500],[\"StrOnePair\",\"Combination1\",\"Spread Combination\",\"spot:Huobi:spot;spot:OKCoin:spot;false;60;5;0;0\"],[\"StrTwoPair\",\"Combination2\",\"Spread Combination\",\"future:Futures_OKCoin:this_week;spot:OKCoin:spot;false;60;5;0;0\"],[\"StrThreePair\",\"Combination3\",\"Spread Combination\",\"future:Futures_OKCoin:this_week;future:Futures_OKCoin:quarter;true;60;5;0;0\"],[\"StrFourPair\",\"Combination4\",\"Spread Combination\",\"null\"],[\"StrSixPair\",\"Combination6\",\"Combination\",\"null\"],[\"StrFivePair\",\"Combination5\",\"Combination\",\"null\"],[\"ResetChart\",\"whether to clear the previous chart\",\"clear the previous chart\",false]]", // Configured exchange objects, set trading pair information "strategy_exchange_pairs": "[60,[44314,42960,15445,14703],[\"BTC_USDT\",\"BTC_USDT\",\"ETH_USDT\",\"ETH_USDT\"]]", // Strategy ID "strategy_id": 21337, // Strategy's last modification time "strategy_last_modified": "2018-11-29 12:07:58", // Strategy name "strategy_name": "Digital currency spread monitoring and analysis", "summary": "Polling time consuming: 500ms\n`[{\"type\":\"table\",\"title\":\"pair basic data\",\"cols\":[\"ID\",\"NameA - NameB\",\"SymbolA - SymbolB\",\"UpdCycle\",\"isUSD\",\"Collect\"],\"rows\":[[\"0 \",\"Huobi/OKEX\",\"spot/spot\",60,false,\"612ms\"],[\"1 \",\"ZB/GateIO\",\"spot/spot\",60,false,\"501ms\"]]},{\"type\":\"table\",\"title\":\"pair market data\",\"cols\":[\"ID\",\"NameA - NameB\",\"SymbolA - SymbolB\",\"A_Bids1\",\"B_Asks1\",\"Plus\",\"A_Asks1\",\"B_Bids1\",\"Minus\"],\"rows\":[[\"0 \",\"Huobi/OKEX\",\"spot/spot\",10518.02,10525.1,-7.08,10520,10523,-3],[\"1 \",\"ZB/GateIO\",\"spot/spot\",285.68,286,-0.32,285.8,285.85,-0.05]]},{\"type\":\"table\",\"title\":\"pair statistical data\",\"cols\":[\"ID\",\"NameA - NameB\",\"SymbolA - SymbolB\",\"Maximum spread\",\"Minimum spread\",\"Mean positive premium\",\"Mean negative premium\"],\"rows\":[[\"0 \",\"Huobi/OKEX\",\"spot/spot\",0,-3,0,-1.47],[\"1 \",\"ZB/GateIO\",\"spot/spot\",0.03,-0.05,0.03,-0.05]]}]`\n", // Whether to enable offline alert "wd": 0 } }, "error": null } }について
summary返されたデータ (ボット状態バーの情報; 10秒間キャッシュ; 最新データではありません) の属性には,現在データ量制限 (キャッシュされたデータ) があります. データ量制限は200KBで,余分なデータは切断されます.GetRobotLogsインターフェースを取得する (とき)GetRobotLogs状態バー,フィールドの情報を取得summary最新のデータです).属性の記述
strategy_exchange_pairs,以下のデータを例として:[60,[44314,42960,15445,14703],[\"BTC_USDT\",\"BTC_USDT\",\"ETH_USDT\",\"ETH_USDT\"]]最初のデータ
60ボットが設定したデフォルトのK線期間は 1分,すなわち 60秒です.[44314,42960,15445,14703]交換対象である.eidボットに設定されている (追加順序に従って)[\"BTC_USDT\",\"BTC_USDT\",\"ETH_USDT\",\"ETH_USDT\"]ロボットによって構成された交換オブジェクトの取引ペアセットです (加算順序と1対1対応で)eid).
GetAccount (ゲットアカウント)
GetAccount()返回するAPI KEYFMZ Quant トレーディング プラットフォームのアカウントの要求で
-
パラメーター ない
-
返金値
{ "code": 0, "data": { "result": { "username": "littlelittledream", "level": 0, "consumed": 3235500000, "invitation_code": "1545967", "points": 25, // The value here, due to precision control, is expressed in integer. To convert it to actual value, you need to divide it by 1e8 (i.e. 10 to the 8th power), and the actual result here is: 65.421 "balance": 6542100000 }, "error": None } }
やってみろ
- Macd を内定時間表で組み合わせた例はありますか?
- 金融取引所のAPIのネットワーク状況についてお尋ねください!
- Huobi 契約の誤り
- 管理者は無料のIBMクラウドファンドリに展開できますか?
- パンダのデータベースをホストにインストールする方法
- Exchange.IO を使ってエラーを復元します
- My言語でbk,skなどの命令を数える問題について
- ブリンズ帯指標の問題
- オーダーパラメータのエラーに遭遇すると,どのようにデュックしますか?
- カスタム回帰データでエラー返信
- 管理者のIPが壁に囲まれると,正常な動作に影響するのでしょうか?
- なぜOKexのフューチャーラインはここ数日で49円しか手に入らないのか?
- "つ目の問題は,
- なぜK線データにアクセスできないのか?
- カスタムデータソースが他の取引所をサポートするかどうかを再テストします.
- このRSIの公式は私が書いたもので,どこかで間違っています.
- デジタル通貨の委託取引の際に発生した事件はありますか?
- ビアン・コンテストの歴史データ
- リクエスト時に init (() 関数で動的にアカウントとコインの数を設定できますか?
- 永続契約を利用できない