FMZ API 지침
저자:제로, 제작: 2020-04-20 10:19:00, 업데이트: 2023-04-12 14:44:56// true
}
[http://underscorejs.org/](http://underscorejs.org/)
```js
function main() {
var sum = _.reduce([1, 2, 3], function(memo, num){return memo + num}, 0)
Log(sum)
}
C++도서관https://nlohmann.github.io/json/void main() { json table = R"({"type": "table", "title": "Position Information", "cols": ["Column1", "Column2"], "rows": [["abc", "def"], ["ABC", "support color #ff0000"]]})"_json; LogStatus("`" + table.dump() + "`"); LogStatus("Fist line message\n`" + table.dump() + "`\nThird line message"); json arr = R"([])"_json; arr.push_back(table); arr.push_back(table); LogStatus("`" + arr.dump() + "`"); table = R"({ "type" : "table", "title" : "Position Operation", "cols" : ["Column1", "Column2", "Action"], "rows" : [ ["abc", "def", {"type": "button", "cmd": "coverAll", "name": "close position"}] ] })"_json; LogStatus("`" + table.dump() + "`", "\n`" + R"({"type": "button", "cmd": "coverAll", "name": "close position"})"_json.dump() + "`"); }
타리브 라이브러리의 기능 지표
다음 기능의 매개 변수 중Records[Close]입력된 k-라인 데이터의 닫기 가격을 나타냅니다.Array()배열을 나타냅니다.Array(outInteger)정수의 배열을 반환하는 것을 나타냅니다.
호출 코드 예제CCI표시기:
function main() {
var records = exchange.GetRecords()
var cci = talib.CCI(records, 14)
Log(cci)
}
import talib
def main():
records = exchange.GetRecords()
# the parameter "14" can be default
cci = talib.CCI(records.High, records.Low, records.Close, 14)
Log(cci)
void main() {
auto records = exchange.GetRecords();
auto cci = talib.CCI(records, 14);
Log(cci);
}
-
Pattern Recognition:지표 설명 CDL2CROWS 두 마리의 까마귀 CDL2CROWS ((기록[Open,High,Low,Close]) = Array ((outInteger) CDL3BLACKCROWS 검은 까마귀 세 마리 CDL3BLACKCROWS ((기록[Open,High,Low,Close]) = Array ((outInteger) CDL3INSIDE 3 내부 위/아래 CDL3INSIDE ((기록[Open,High,Low,Close]) = Array ((outInteger) CDL3LINESTRIKE 3선 공격 CDL3LINESTRIKE ((기록[Open,High,Low,Close]) = Array ((outInteger) CDL3외면 3 위/아래 CDL3OUTSIDE ((기록[Open,High,Low,Close]) = Array ((outInteger) CDL3STARSINSOUTH 남쪽 에서 3 개의 별 CDL3STARSINSOUTH ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDL3 백병자 3 명 의 백인 군인 들 이 진격 CDL3WHITESOLDIERS ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLABANDONEDBABY 버려진 아기 CDLABANDONEDBABY ((기록[Open,High,Low,Close],Penetration = 0.3) = Array ((outInteger) ] CDLADVANCEBLOCK 사전 차단 CDLADVANCEBLOCK ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDLBELTHOLD 벨트 잡기 CDLBELTHOLD ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLB레이크아웨이 탈퇴 CDLBREAKAWAY ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLCLOSING 마루보즈 마루보즈 CDLCLOSINGMARUBOZU ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDLCONCEALBABYSWALL 아기 나비 를 숨기는 것 CDLCONCEALBABYSWALL ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDL반격 반격 CDLCOUNTERATTACK ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDDARKCLOUDCOVER 어두운 구름 덮개 CDLDARKCLOUDCOVER ((기록[Open,High,Low,Close],Penetration = 0.5) = Array ((outInteger) ] CDLDOJI 도지 CDLDOJI ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDLDOJISTAR 도지 스타 CDLDOJISTAR ((기록[Open,High,Low,Close]) = Array ((outInteger) 드래곤 플라이도지 드래곤플라이 도지 CDLDRAGONFLYDOJI ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLENGULFING 삼키는 패턴 CDLENGULFING ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLEVENINGDOJISTAR 저녁 도지 별 CDLEVENINGDOJISTAR ((기록[Open,High,Low,Close],Penetration = 0.3) = Array ((outInteger) ] CDLEVENINGSTAR 저녁 별 CDLEVENINGSTAR ((기록[Open,High,Low,Close],Penetration = 0.3) = Array ((outInteger) ] CDLGAPSIDESIDEWHITE 이 있습니다. 위/아래 간격 옆 하얀 선 CDLGAPSIDESIDESWHITE ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDLGRAVESTONEDOJI 무덤 도지 CDLGRAVESTONEDOJI ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDLHAMMER 망치 CDLHAMMER ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLHANGINGMAN 교수형 CDLHANGINGMAN ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLHARAMI 하라미 패턴 CDLHARAMI ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLHARAMICROSS 하라미 십자 패턴 CDLHARAMICROSS ((기록[Open,High,Low,Close]) = Array ((outInteger) CDHIGHWAVE 높은 파동 촛불 CDLHIGHWAVE ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLHIKKAKE 히카케 패턴 CDLHIKKAKE ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLHIKKAKEMOD 수정 된 히카케 패턴 CDLHIKKAKEMOD ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLHOMINGPIGEON 호밍 비둘기 CDLHOMINGPIGEON ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLIDENTICAL3CROWS 동일 한 세 마리의 까마귀 CDLIDENTICAL3CROWS ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLINNECK 목 안의 패턴 CDLINNECK ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLINVERTEDHAMMER 뒤집은 망치 CDLINVERTEDHAMMER ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLKICK 다 CDLKICKING ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLKICKINGBYLENGTH - 더 긴 마루보즈에 의해 결정된 황소/곰 CDLKICKINGBYLENGTH ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLLADDERBOTTOM 사다리 바닥 CDLLADDERBOTTOM ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLLONGLEGGEDDOJI 긴 다리 도즈 CDLLONGLEGGEDDOJI ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDLLONGLINE 장선 촛불 CDLLONGLINE ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLMARUBOZU 마루보즈 CDLMARUBOZU ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDLMATCHINGLOW 적당한 수준 CDLMMATCHINGLOW ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLMATHOLD 매트 홀드 CDLMATHOLD ((기록[Open,High,Low,Close],Penetration = 0.5) = Array ((outInteger) ] CDMORNINGDOJISTAR 아침 도지 별 CDLMORNINGDOJISTAR ((기록[Open,High,Low,Close],Penetration = 0.3) = Array ((outInteger) ] CDLMORNINGSTAR 아침 별 CDLMORNINGSTAR ((기록[Open,High,Low,Close],Penetration = 0.3) = Array ((outInteger) ] CDLONNECK 목 모양 CDLONNECK ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLPIERCING 뚫어지는 패턴 CDLPIERCING ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLRICKSHAWMAN 릭샤맨 CDLRICKSHAWMAN ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLRISEFALL3 방법 상승/하락 세 가지 방법 CDLRISEFALL3METHODS ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLS분립선 분단선 CDLSEPARATINGLINES ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLSHOOTINGSTAR 쏘닝 스타 CDLSHOOTINGSTAR ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLS코르트라인 짧은 선 촛불 CDLSSORTLINE ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLSPINNINGTOP 스핀 톱 CDLSPINNINGTOP ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLSTALLEDPATTERN 정지된 패턴 CDLSTALLEDPATTERN ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDLSTICKSANDWICH 스틱 샌드위치 CDLSTICKSANDWICH ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDLTAKURI 타쿠리 (드래곤플라이 도지) CDLTAKURI ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLTASUKIGAP 타스키 간격 CDLTASUKIGAP ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLTHRUSTING 밀어주는 패턴 CDLTHRUSTING ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLTRISTAR 트리스타 패턴 CDLTRISTAR ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLUNIQUE3RIVER 유니크 3 강 CDLUNIQUE3RIVER ((기록[Open,High,Low,Close]) = 배열 (outInteger) CDLUPSIDEGAP2CROWS 상향 격차 두 까마귀 CDLUPSIDEGAP2CROWS ((기록[Open,High,Low,Close]) = Array ((outInteger) CDLXSIDEGAP3방법 상향/하향 격차 세 가지 방법 CDLXSIDEGAP3METHODS ((기록[Open,High,Low,Close]) = Array ((outInteger) -
Volume Indicators:지표 설명 AD Chaikin A/D 라인 AD ((기록[높은, 낮은, 가까운, 볼륨]) = 배열 (outReal) ADOSC Chaikin A/D 오시레이터 ADOSC ((기록[최고,최하,최근,용량],빠른 기간 = 3, 느린 기간 = 10) = 배열 ((outReal) OBV 부산량에 대해 OBV ((기록[Close],기록[Volume]) = 배열 (outReal) -
Math Transform:지표 설명 ACOS 벡터 삼각형 ACos ACOS ((기록[Close]) = 배열 (outReal) ASIN 벡터 삼각형 ASin ASIN ((Records[Close]) = 배열 (outReal) ATAN 벡터 삼각형 ATan ATAN ((기록[Close]) = 배열 (outReal) CEIL 벡터 천장 CEIL ((기록[Close]) = 배열 ((outReal) COS 벡터 삼각형 Cos COS ((Records[Close]) = 배열 (outReal) COSH 벡터 삼각법 코쉬 COSH ((Records[Close]) = 배열 (outReal) EXP 벡터 수학적 Exp EXP ((Records[Close]) = 배열 (outReal) 바닥 벡터 바닥 FLOOR ((기록[Close]) = 배열 (outReal) LN 벡터 로그 자연 LN ((Records[Close]) = 배열 ((outReal) LOG10 벡터 로그10 LOG10 ((기록[Close]) = 배열 (outReal) SIN 벡터 삼각법적 음수 SIN ((Records[Close]) = 배열 ((outReal) SINH 벡터 삼각법성 SINH ((Records[Close]) = 배열 (outReal) SQRT 벡터 제곱근 SQRT ((Records[Close]) = 배열 (outReal) TAN 벡터 삼각형 TAN ((기록[Close]) = 배열 (outReal) TANH 벡터 삼각법 Tanh TANH ((Records[Close]) = 배열 (outReal) -
Math Operators:지표 설명 최대 특정 기간 동안 가장 높은 값 MAX ((Records[Close],Time Period = 30) = 배열 (outReal) MAXINDEX 특정 기간 동안 가장 높은 값의 지수 MAXINDEX ((Records[Close],Time Period = 30) = 배열 (outInteger) 미니 특정 기간 중 가장 낮은 값 MIN ((Records[Close],Time Period = 30) = 배열 (outReal) MININDEX 특정 기간 동안 가장 낮은 값의 지수 MININDEX ((Records[Close],Time Period = 30) = 배열 (outInteger) MINMAX 정해진 기간 동안 가장 낮은 값과 가장 높은 값 MINMAX ((Records[Close],Time Period = 30) = [Array ((outMin),Array ((outMax) ] MINMAXINDEX 특정 기간 동안 가장 낮은 값과 가장 높은 값의 지수 MINMAXINDEX ((Records[Close],Time Period = 30) = [Array ((outMinIdx),Array ((outMaxIdx) ] 합계 요약 SUM ((Records[Close],Time Period = 30) = 배열 (outReal) -
Cycle Indicators:지표 설명 HT_DCPERIOD 힐베르트 변환 - 지배적 순환 기간 HT_DCPERIOD ((기록[Close]) = 배열 (outReal) HT_DCPHASE 힐베르트 변환 - 주류주기 단계 HT_DCPHASE ((기록[Close]) = 배열 (outReal) HT_PHASOR 힐베르트 변환 - 파소어 구성요소 HT_PHASOR ((기록[Close]) = [Array ((outInPhase),Array ((outQuadrature) ] HT_SINE 힐베르트 변환 - 시네오 웨브 HT_SINE ((Records[Close]) = [Array ((outSine),Array ((outLeadSine) ] HT_TRENDMODE 힐베르트 변환 - 트렌드 대 사이클 모드 HT_TRENDMODE ((기록들[Close]) = 배열 (outInteger) -
Volatility Indicators:지표 설명 ATR 평균 실제 범위 ATR ((기록[High,Low,Close],Time Period = 14) = Array ((outReal) NATR 정규화 된 평균 실제 범위 NATR (NATR) 레코드 (High,Low,Close), 시간 기간 = 14) = 배열 (Array) TRANGE 실제 범위 TRANGE ((Records[High,Low,Close]) = 배열 (outReal) -
Overlap Studies:지표 설명 BBBAND 볼링거 밴드 BBANDS ((기록[ 닫기],시간 기간 = 5,상향 오차 = 2,하향 오차 = 2,MA 타입 = 0) = [어레이 (아웃리얼UpperBand),어레이 (아웃리얼MiddleBand),어레이 (아웃리얼LowerBand) ] DEMA 이중 기하급수적 이동 평균 DEMA ((기록[ 닫기],시간 기간 = 30) = 배열 ((outReal) EMA 기하급수적인 이동 평균 EMA (기록[ 닫기]), 시간 기간 = 30) = 배열 (outReal) HT_TRENDLINE 힐베르트 변환 - 순간적인 경향선 HT_TRENDLINE ((기록[Close]) = 배열 (outReal) 카마 카우프만 적응 이동 평균 KAMA ((기록[Close],Time Period = 30) = 배열 (outReal) MA 이동 평균 MA ((기록[ 닫기],시간 기간 = 30, MA 타입 = 0) = 배열 ((outReal) 엄마 MESA 적응 이동 평균 MAMA ((기록[Close],Fast Limit = 0.5,Slow Limit = 0.05) = [Array ((outMAMA),Array ((outFAMA) ] 중간점 기간 중점 MIDPOINT ((기록[Close],Time Period = 14) = Array ((outReal) 중간 가격 중점 가격 기간 MIDPRICE ((기록[최고, 최하위],시간 기간 = 14) = 배열 (outReal) SAR 파라볼 SAR SAR ((기록[고, 낮은],가속 요인 = 0.02,AF 최대 = 0.2) = 배열 (outReal) SAREXT 파라볼리 SAR - 확장 SAREXT ((기록[High,Low],start Value = 0,Offset on Reverse = 0,AF Init Long = 0.02,AF Long = 0.02,AF Max Long = 0.2,AF Init Short = 0.02,AF Short = 0.02,AF Max Short = 0.2) = Array ((outReal) SMA 단순 이동 평균 SMA ((기록[ 닫기],시간 기간 = 30) = 배열 ((outReal) T3 삼배 지수적 이동 평균 (T3) T3 ((Records[Close],Time Period = 5,Volume Factor = 0.7) = Array ((outReal) 테마 삼배 지수적 이동 평균 TEMA ((Records[Close],Time Period = 30) = 배열 (outReal) TRIMA 삼각형 이동 평균 TRIMA ((기록들[Close],시간 기간 = 30) = 배열 (outReal) WMA 가중화 이동 평균 WMA ((기록[Close],시간 기간 = 30) = 배열 (outReal) -
Statistic Functions:지표 설명 LINEARREG 선형 회귀 LINEARREG ((Records[Close],Time Period = 14) = 배열 (outReal) LINEARREG_ANGLE 선형 회귀 각 LINEARREG_ANGLE ((Records[Close],Time Period = 14) = 배열 (outReal) LINEARREG_INTERCEPT 선형 회귀 차단 LINEARREG_INTERCEPT ((Records[Close],Time Period = 14) = 배열 (outReal) LINEARREG_SLOPE 선형 회귀 기울기 LINEARREG_SLOPE ((기록[Close],Time Period = 14) = Array ((outReal) STDDEV 표준편차 STDDEV ((Records[Close],Time Period = 5,Deviations = 1) = Array ((outReal) ] TSF 시간 시리즈 예측 TSF ((Records[Close],Time Period = 14) = 배열 (outReal) VAR 변동성 VAR ((Records[Close],Time Period = 5,Deviations = 1) = Array ((outReal) -
Momentum Indicators:지표 설명 ADX 평균 방향 운동 지수 ADX ((기록[High,Low,Close],Time Period = 14) = Array ((outReal) ] ADXR 평균 방향 움직임 지수 등급 ADXR ((기록[최고,하위,접근],시간 기간 = 14) = 배열 (outReal) APO 절대 가격 오시레이터 APO ((기록[ 닫기]],빠른 기간 = 12, 느린 기간 = 26, MA 타입 = 0) = 배열 ((outReal) 아론 아론 AROON ((기록[High,Low],Time Period = 14) = [Array ((outAroonDown),Array ((outAroonUp) ] AROONOSC 아론 오시레이터 AROONOSC ((기록[고등,하위],시간 기간 = 14) = 배열 (outReal) BOP 힘 의 균형 BOP ((기록[Open,High,Low,Close]) = 배열 (outReal) CCI 상품 채널 지수 CCI ((기록[최고,최하,최근],시간 기간 = 14) = 배열 (outReal) CMO 데 모멘텀 오시레이터 CMO ((기록[ 닫기],시간 기간 = 14) = 배열 ((outReal) DX 방향 운동 지수 DX ((기록[높음, 낮음, 근],시간 기간 = 14) = Array ((outReal) MACD 이동 평균 컨버전스/디버전스 MACD ((기록[ 닫기],빠른 기간 = 12, 느린 기간 = 26, 신호 기간 = 9) = [열 (outMACD),열 (outMACDSignal),열 (outMACDHist) ] MACDEXT 제어 가능한 MA 타입의 MACD MACDEXT ((기록[ 닫기],빠른 기간 = 12,빠른 MA = 0, 느린 기간 = 26, 느린 MA = 0, 신호 기간 = 9, 신호 MA = 0) = [열 (outMACD),열 (outMACDSignal),열 (outMACDHist) ] MACDFIX 이동평균 컨버전스/디버전스 수정 12/26 MACDFIX ((기록[닫기],신호 기간 = 9) = [열 (outMACD),열 (outMACDSignal),열 (outMACDHist) ] MFI 현금 흐름 지수 MFI ((기록[최고,최하,최근,용량],시간 기간 = 14) = Array ((outReal) MINUS_DI 마이너스 방향 지표 MINUS_DI ((기록[최고,최하,최근],시간 기간 = 14) = Array ((outReal) MINUS_DM - 방향 이동 MINUS_DM ((Records[High,Low],Time Period = 14) = 배열 (outReal) 엄마 추진력 MOM ((기록[Close],Time Period = 10) = Array ((outReal) PLUS_DI + 방향 지표 PLUS_DI ((기록[최고,최하,최근],시간 기간 = 14) = 배열 (outReal) PLUS_DM + 방향 이동 PLUS_DM ((Records[High,Low],Time Period = 14) = 배열 (outReal) PPO % 가격 오시레이터 PPO ((기록[ 닫기]],빠른 기간 = 12, 느린 기간 = 26, MA 타입 = 0) = 배열 ((outReal) ROC 변화율: ((가격/전시 가격) -1) * 100 ROC ((Records[Close],Time Period = 10) = 배열 (outReal) ROCP 변화율 %: (가격-prevPrice) /prevPrice ROCP ((Records[Close],Time Period = 10) = 배열 (outReal) ROCR 변화율 비율: (가격/예전 가격) ROCR ((기록[ 닫기],시간 기간 = 10) = 배열 ((outReal) ROCR100 변화율 비율 100 스칼라: (가격/예전 가격) *100 ROCR100 ((Records[Close],Time Period = 10) = 배열 (outReal) RSI 상대적 강도 지수 RSI ((기록[닫기],시간 기간 = 14) = 배열 (outReal) 스톡 스토카스틱 STOCH ((기록[High,Low,Close],Fast-K Period = 5,Slow-K Period = 3,Slow-K MA = 0,Slow-D Period = 3,Slow-D MA = 0) = [Array(outSlowK),Array(outSlowD] 스톡 스토카스틱 패스트 STOCHF ((기록[고등, 낮은, 가까운],Fast-K 기간 = 5,Fast-D 기간 = 3,Fast-D MA = 0) = [수열 (outFastK),Array ((outFastD) ] STOCHRSI 스토카스틱 상대적 강도 지수 STOCHRSI ((기록들[Close],Time Period = 14,Fast-K Period = 5,Fast-D Period = 3,Fast-D MA = 0) = [Array(outFastK),Array(outFastD] TRIX 트리플 슬림 EMA의 1일 변화율 (ROC) TRIX ((기록들[Close],시간 기간 = 30) = 배열 (outReal) ULTOSC 최후 오시레이터 ULTOSC (기록) [최고, 최하위, 최후] 첫 번째 기간 = 7, 두 번째 기간 = 14, 세 번째 기간 = 28) = 배열 (outReal) WILLR 윌리엄스 %R WILLR ((Records[High,Low,Close],Time Period = 14) = Array ((outReal) ] -
Price Transform:지표 설명 AVGPRICE 평균 가격 AVGPRICE ((Records[Open,High,Low,Close]) = Array ((outReal) MEDPRICE 중간 가격 MEDPRICE ((기록[최고,최하]) = 배열 (outReal) 종류 가격 전형적 가격 TYPPRICE ((기록[높은, 낮은, 가까운]) = Array ((outReal) WCLPRICE 가중화 된 폐쇄 가격 WCLPRICE ((기록[최고,최하,최근]) = 배열 (outReal)
기본 자료
FMZ 퀀트 트레이딩 플랫폼은 봇에서 다양한 기본 데이터를 백테스팅하고 검색하는 것을 지원합니다. FMZ 퀀트 트레이딩 플랫폼 데이터 센터에 의해 기본 데이터가 실시간으로 제공되며 데이터 센터는 다양한 기본 데이터를 수집하고 요약 할 것입니다.
데이터 호출
사용exchange.GetData(Source)기본 데이터를 얻기 위한 기능입니다.
암호화폐의 기본 데이터는 일시적으로 수집되지 않았습니다.
데이터 형식
암호화폐의 기본 데이터는 일시적으로 수집되지 않았습니다.
FMZ 플랫폼의 API 확장
FMZ 퀀트 트레이딩 플랫폼은 플랫폼의 다양한 기능의 프로그래밍 호출을 지원하며 확장 된 API를 개방했습니다.
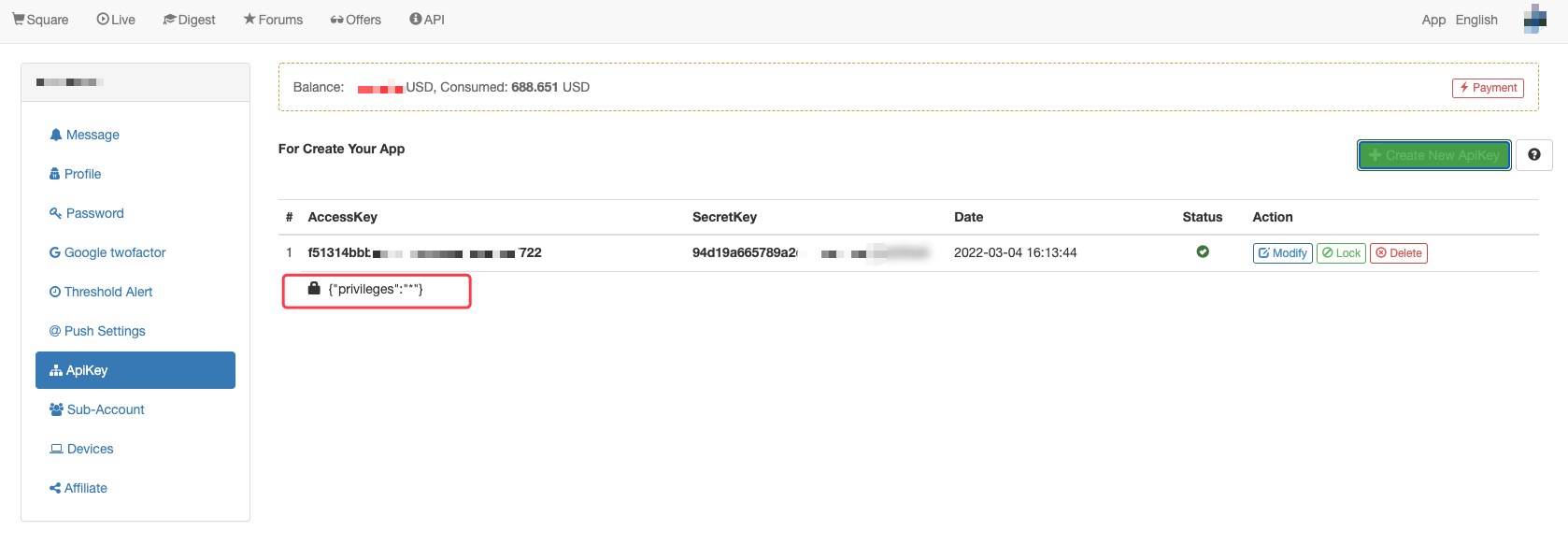
그것은 그림에서 보여지는 API 권한 관리 확장 프로그램을 지원합니다:
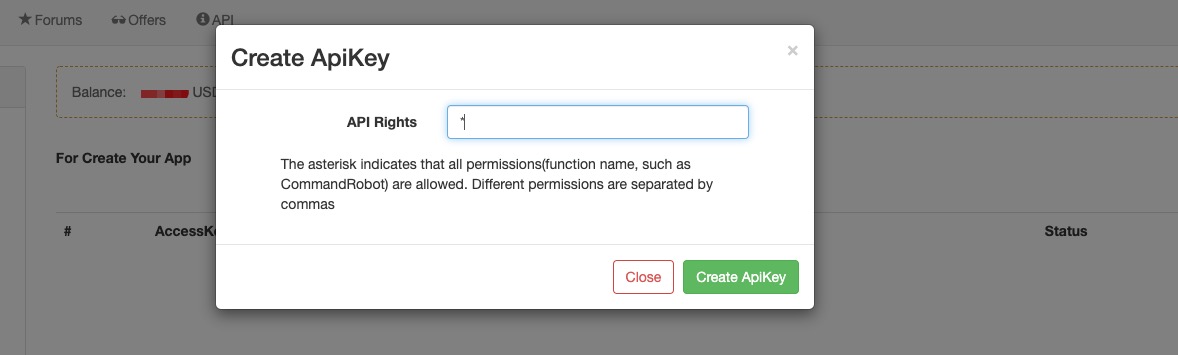
새로 추가된API KEY모든 권한이 있어야 합니다.*API 권한 입력 상자에 모든 인터페이스 권한을 열기 위해 특정 인터페이스 권한을 지정하고 해당 확장된 API 함수 이름을 입력합니다.GetRobotDetail, DeleteRobot, 즉, 이것을 줘API KEY허가보트 인터페이스의 자세한 정보를 얻으십시오그리고봇 인터페이스를 삭제.
ApiKey를 생성합니다
API 반환 코드
| 설명 | 코드 |
|---|---|
| 성공적 실행 | 0 |
| 잘못된 API 키 | 1 |
| 잘못된 서명 | 2 |
| 논스 오류 | 3 |
| 잘못된 방법 | 4 |
| 잘못된 매개 변수 | 5 |
| 내부 알 수 없는 오류 | 6 |
봇 상태
(정상적인 시작)
| 상태 | 코드 |
|---|---|
| 비활성 | 0 |
| 운용 중 | 1 |
| 정지 | 2 |
| 출력 | 3 |
| 멈췄다 | 4 |
| 전략에는 오류가 있습니다. | 5 |
(비정상)
| 상태 | 코드 |
|---|---|
| 전략은 만료되었습니다, 그리고 다시 구입하기 위해 작가에 연락하십시오 | -1 |
| 도커가 발견되지 않았습니다. | -2 |
| 전략 컴파일 오류 | -3 |
| 로봇이 이미 실행중입니다. | -4 |
| 불충분한 잔액 | -5 |
| 동시 전략의 수는 한계를 초과합니다. | -6 |
확인 방법
토큰 검증
사용md5검증하기 위한 암호화 방법.
파이썬, 골랑어 호출 예제:
#!/usr/bin/python
# -*- coding: utf-8 -*-
import time
import json
import ssl
ssl._create_default_https_context = ssl._create_unverified_context
try:
import md5
import urllib2
from urllib import urlencode
except:
import hashlib as md5
import urllib.request as urllib2
from urllib.parse import urlencode
accessKey = 'f27bfcXXXXXXXX013c62e98XXXXX817a'
secretKey = 'ffeXXXXXXXX085ff7269XXXXXXXX6f82'
def api(method, *args):
d = {
'version': '1.0',
'access_key': accessKey,
'method': method,
'args': json.dumps(list(args)),
'nonce': int(time.time() * 1000),
}
d['sign'] = md5.md5(('%s|%s|%s|%d|%s' % (d['version'], d['method'], d['args'], d['nonce'], secretKey)).encode('utf-8')).hexdigest()
# Note: for the timeout problem of "urllib2.urlopen" function, you can set the timeout time; for example, urllib2.urlopen ('https://www.fmz.com/api/v1', urlencode(d).encode('utf-8'), timeout = 10), that is, set timeout for 10 seconds
return json.loads(urllib2.urlopen('https://www.fmz.com/api/v1', urlencode(d).encode('utf-8')).read().decode('utf-8'))
# Return the docker list
print(api('GetNodeList'))
# Return the exchange list
print(api('GetPlatformList'))
# GetRobotList (offset, length, robotStatus, label); passing "-1" means obtaining all
print(api('GetRobotList', 0, 5, -1, 'member2'))
# CommandRobot(robotId, cmd) sends commands to the bot
print(api('CommandRobot', 123, 'ok'))
# StopRobot(robotId) returns the bot status code
print(api('StopRobot', 123))
# RestartRobot(robotId) returns the bot status code
print(api('RestartRobot', 123))
# GetRobotDetail(robotId) returns detailed bot information
print(api('GetRobotDetail', 123))
package main
import (
"fmt"
"time"
"encoding/json"
"crypto/md5"
"encoding/hex"
"net/http"
"io/ioutil"
"strconv"
"net/url"
)
// Fill in your own FMZ platform api key
var apiKey string = ""
// Fill in your own FMZ platform secret key
var secretKey string = ""
var baseApi string = "https://www.fmz.com/api/v1"
func api(method string, args ... interface{}) (ret interface{}) {
// Process args
jsonStr, err := json.Marshal(args)
if err != nil {
panic(err)
}
params := map[string]string{
"version" : "1.0",
"access_key" : apiKey,
"method" : method,
"args" : string(jsonStr),
"nonce" : strconv.FormatInt(time.Now().UnixNano() / 1e6, 10),
}
data := fmt.Sprintf("%s|%s|%s|%v|%s", params["version"], params["method"], params["args"], params["nonce"], secretKey)
h := md5.New()
h.Write([]byte(data))
sign := h.Sum(nil)
params["sign"] = hex.EncodeToString(sign)
// http request
client := &http.Client{}
// request
urlValue := url.Values{}
for k, v := range params {
urlValue.Add(k, v)
}
urlStr := urlValue.Encode()
request, err := http.NewRequest("GET", baseApi + "?" + urlStr, nil)
if err != nil {
panic(err)
}
resp, err := client.Do(request)
if err != nil {
panic(err)
}
defer resp.Body.Close()
b, err := ioutil.ReadAll(resp.Body)
if err != nil {
panic(err)
}
ret = string(b)
return
}
func main() {
settings := map[string]interface{}{
"name": "hedge test",
"strategy": 104150,
// K-line period parameter "60" means 60 seconds
"period": 60,
"node" : 73938,
"appid": "member2",
"exchanges": []interface{}{
map[string]interface{}{
"eid": "Exchange",
"label" : "test_bjex",
"pair": "BTC_USDT",
"meta" : map[string]interface{}{
// Fill in the access key
"AccessKey": "",
// Fill in the secret key
"SecretKey": "",
"Front" : "http://127.0.0.1:6666/exchange",
},
},
},
}
method := "RestartRobot"
fmt.Println("Call interface:", method)
ret := api(method, 124577, settings)
fmt.Println("main ret:", ret)
}
직접 확인
이 시스템은token합격secret_key예를 들어, 직접 접속할 수 있는 URL을 생성할 수 있습니다.TradingView또는WebHook다른 경우에 다시 호출합니다.
에 대해CommandRobot(RobotId, Cmd)함수, 매개 변수nonce확인이 필요없고 인터페이스의 접속 빈도와 방문 시간은 제한되지 않습니다.
https://www.fmz.com/api/v1?access_key=xxx&secret_key=yyyy&method=CommandRobot&args=[186515,"ok12345"]
직접적인 검증이 뒷받침되는 경우에만CommandRobot인터페이스가 지원됩니다Body예를 들어,WebHook URL의TradingView:
https://www.fmz.com/api/v1?access_key=fd3be82e9e6e6ed4439f2793a5e9ca&secret_key=520b9f10f3768e6ad1af59ff25184&method=CommandRobot&args=[130350,+""]
다음 포맷에 따라 설정에 주의를 기울여:args=[130350,+""], 그 중130350로봇이IDFMZ 퀀트 트레이딩 플랫폼의
메시지 상자에서 설정 (보청된
-
JSON 형식:
{"close": {{close}}, "name": "aaa"}그 로봇은
ID의186515인터랙티브 명령어를 받을 수 있습니다.{"close": 39773.75, "name": "aaa"}. -
텍스트 형식:
BTCUSDTPERP Crossing 39700.00 close: {{close}}그 로봇은
ID의186515인터랙티브 명령어를 받을 수 있습니다.BTCUSDTPERP Crossing 39700.00 close: 39739.4.
예를 들어Python & Golang언어 호출:
#!/usr/bin/python
# -*- coding: utf-8 -*-
import json
import ssl
ssl._create_default_https_context = ssl._create_unverified_context
try:
import urllib2
except:
import urllib.request as urllib2
accessKey = 'your accessKey'
secretKey = 'your secretKey'
def api(method, *args):
return json.loads(urllib2.urlopen(('https://www.fmz.com/api/v1?access_key=%s&secret_key=%s&method=%s&args=%s' % (accessKey, secretKey, method, json.dumps(list(args)))).replace(' ', '')).read().decode('utf-8'))
# If APIKEY does not have the interface permission, the call to print(api('RestartRobot', 130350)) will fail, and the returned data is: {'code': 4, 'data': None}
# print(api('RestartRobot', 130350))
# Print bot details with ID 130350
print(api('GetRobotDetail', 130350))
package main
import (
"fmt"
"encoding/json"
"net/http"
"io/ioutil"
"net/url"
)
// Fill in your own FMZ platform api key
var apiKey string = "your access_key"
// Fill in your own FMZ platform secret key
var secretKey string = "your secret_key"
var baseApi string = "https://www.fmz.com/api/v1"
func api(method string, args ... interface{}) (ret interface{}) {
jsonStr, err := json.Marshal(args)
if err != nil {
panic(err)
}
params := map[string]string{
"access_key" : apiKey,
"secret_key" : secretKey,
"method" : method,
"args" : string(jsonStr),
}
// http request
client := &http.Client{}
// request
urlValue := url.Values{}
for k, v := range params {
urlValue.Add(k, v)
}
urlStr := urlValue.Encode()
request, err := http.NewRequest("GET", baseApi + "?" + urlStr, nil)
if err != nil {
panic(err)
}
resp, err := client.Do(request)
if err != nil {
panic(err)
}
defer resp.Body.Close()
b, err := ioutil.ReadAll(resp.Body)
if err != nil {
panic(err)
}
ret = string(b)
return
}
func main() {
method := "GetRobotDetail"
fmt.Println("Call interface:", method)
ret := api(method, 130350)
fmt.Println("main ret:", ret)
}
FMZ Quant의 확장 API를 사용하여
확장 API 설명
-
FMZ 퀀트 트레이딩 플랫폼의 확장 API
https://www.fmz.com/api/v1?위의 기호
?요청 매개 변수들이 그 뒤를 잇습니다.요청 매개 변수
Python언어:{ 'version' : '1.0', # Access key, applied on the account management page 'access_key': '8a1f6c3785fd78a1848320e0b19js99f', # The specific method called 'method' : 'GetNodeList', # The parameter list of specific method algorithm 'args' : [], # Timestamp, in the unit of millisecond, is allowed to have 1 hour of time error both before and after the standard timestamp;the nonce must be greater than the nonce value of the last access 'nonce' : 1516292399361, # Signature 'sign' : '085b63456c93hfb243a757366600f9c2' }매 매개 변수 이름은 문자
&, 그리고 매개 변수 이름과 값은 기호와 연결되어 있습니다=전체 요청 URL (취소)method=GetNodeList예를 들어):https://www.fmz.com/api/v1? access_key=8a1f6c3785fd78a1848320e0b19js99f& nonce=1516292399361& args=%5B%5D& sign=085b63456c93hfb243a757366600f9c2& version=1.0& method=GetNodeList주의를 기울여
secret_key요청 매개 변수들 사이에서 -
서명 방법 요청 매개 변수에서 매개 변수
sign암호화된 문자열이고 암호화 방법은 다음과 같습니다.포맷에 따라:
version + "|" + method + "|" + args + "|" + nonce + "|" + secretKey문자열을 연결한 후,MD5암호 알고리즘은 문자열을 암호화하고, 매개 변수의 값으로 지칭되는 열여섯 자리 데이터 문자열 값으로 변환합니다.
sign.참조
Python서명 부분의 코드:# parameter d = { 'version': '1.0', 'access_key': accessKey, 'method': method, 'args': json.dumps(list(args)), 'nonce': int(time.time() * 1000), } # Calculate "sign" signature (encrypted) d['sign'] = md5.md5(('%s|%s|%s|%d|%s' % (d['version'], d['method'], d['args'], d['nonce'], secretKey)).encode('utf-8')).hexdigest()
GetNodeList()
GetNodeList()FMZ 양 거래 플랫폼 계정의 도커 목록을 반환API KEY신청서에서
-
매개 변수 아무 것도 없습니다
-
반환 값
{ "code": 0, "data": { "result": { "nodes": [{ // Version number "build": "3.3", "date": "2018-01-19 10:35:24", "id": 34500, "ip": "126.28.21.120", // Number of the bots running on this docker "loaded": 1, "name": "iZ9116xhkgtZ", // Whether online "online": true, // Operation system "os": "linux", // Whether to enable offline alert "wd": 0 }, ... ] }, "error": null } }
GetRobotGroupList (로봇그룹 목록)
GetRobotGroupList()FMZ 양자 거래 플랫폼 계정의 bot 그룹 목록을 반환API KEY신청서에서
-
매개 변수 아무 것도 없습니다
-
반환 값
{ "code":0, "data":{ "result":{ // All bot grouping information: group ID, group name "items":[{"id":1122,"name":"test"}] }, "error":null } }
GetPlatformList()
GetPlatformList()FMZ 양 거래 플랫폼 계정에 의해 추가 된 거래소의 목록을 반환API KEY신청서에서
-
매개 변수 아무 것도 없습니다
-
반환 값
{ "code": 0, "data": { "result": { "platforms": [{ "eid": "Huobi", "id": 12483, // The label when adding a platform "label": "huobi - test ETH/ETC", "logo": "huobi.png", "name": "huobi", "stocks": ["LTC_BTC", "ETH_BTC", "ETC_BTC", "BCH_BTC"], "website": "https://www.huobi.pro/" }, { "eid": "AEX", "id": 16345, "label": "AEX", "logo": "", "name": "AEX", "stocks": ["LTC_BTC", "ETH_BTC", "ETC_BTC", "BCC_BTC"], "website": "https://www.aex.com/" }, ... ] }, "error": null } }
GetRobotList (로봇 목록)
GetRobotList(offset, length, robotStatus, label)FMZ 양 거래 플랫폼 계정의 로봇 목록을 반환API KEY신청서에서
-
매개 변수
offset,length그리고robotStatus정수 타입이며,label문자열 타입입니다.offsetlengthrobotStatus(-1 을 통과하면 모든 것을 얻는다) label(개인용 라벨; 라벨을 가진 모든 봇은 플리트 할 수 있습니다)
에 대해
Python코드 예제, 위의 참조확인 방법 - 토큰 확인그리고 다음은Python호출 예제:print api('GetRobotList', 'member2')사용자 지정 레이블로 모든 로봇의 정보를 인쇄member2.print api('GetRobotList', 0, 5, -1, 'member2')0에서 5까지의 페이지와member2. -
반환 값
{ "code": 0, "data": { "result": { "all": 53, "bots": [{ "date": "2017-12-25 09:29:27", "end_time": "2017-12-28 17:44:21", "id": 66054, // If the value is 1, the bot is a virtual platform bot "is_sandbox": 1, "name": "C++ test strategy", "node_guid": "705d9aaaaaaaa93b49baaaaa787581cb087", "profit": 0, "public": 0, "refresh": 151345645647000, "start_time": "2017-12-28 17:44:15", "status": 3, "strategy_id": 65365, "strategy_isowner": true, "strategy_name": "C++ Version Docker API Test Strategy(cryptocurrency futures and spot markets)", "wd": 0 }, ... ] }, "error": null } }
커맨드로봇
CommandRobot(RobotId, Cmd)인터페이스는 상호 작용 명령어를 해당 로봇 (로봇) 에 전송합니다.ID: RobotId) 의API KEYFMZ Quant 계정 요청 (인터랙티브 명령은GetCommand()API는 전략을 호출하고 반환합니다.)
-
매개 변수
RobotId정수 타입입니다. bot 입니다.ID;Cmd문자열 형식으로 되어 있습니다. 이 문자열은 로봇에게 상호작용 명령을 보내죠.RobotId보트ID, 수요자를 통해GetRobotList(...)interface.Cmdbot에 전송되는 인터랙티브 명령어입니다. 명령어는 함수에 의해 캡처됩니다GetCommand(), 이는 전략의 상호 작용 논리를 유발합니다 (전략의 상호 작용 논리를 실현하려면GetCommand()파일의 함수)
-
반환 값
{ // The API request was successfully executed "code": 0, "data": { // However, sending a command to a bot that is not running returns failure "result": false, "error": null } }
정지Robot(RobotId)
StopRobot(RobotId)지정된 ID (로봇) 로봇을 실행하지 않습니다ID: RobotId),API KEYFMZ Quant 계정의 요청에
-
매개 변수
RobotId정수 타입입니다. bot 입니다.ID,GetRobotList(...)인터페이스StopRobot(RobotId)인터페이스는 정지된 로봇의 상태 코드를 반환합니다. -
반환 값
{ "code": 0, "data": { // 2 means stopping "result": 2, "error": null } }
다시 시작Robot(...)
RestartRobot(RobotId, Settings)지정된 ID (로봇) 로 로봇을 다시 시작합니다.ID: RobotId),API KEYFMZ Quant 계정의 요청에
만약 로봇이 확장 API로 만들어졌다면, 확장 APIRestartRobot (RobotId, Settings)재시작에 사용해야 합니다.Settings매개 변수를 전달해야 합니다.
플랫폼 페이지에서 만든 로봇은 확장 API를 통해 또는 페이지의 버튼을 클릭하여 다시 시작할 수 있습니다.Settings매개 변수, 또는 그냥 전달RobotId매개 변수를 통과하면RobotId패러미터, 현재 봇 설정에 따라 봇을 시작하십시오.
-
매개 변수
-
봇을 구성하지 않고, 전략 매개 변수를
Settings:RobotId정수 타입입니다. 로봇은ID수록할 수 있습니다GetRobotList(...). -
보트를 구성하면 전략 매개 변수가
Settings:RobotId정수 타입입니다. botID수록할 수 있습니다GetRobotList(...).Settings의JSON객체 유형Settings파라미터 포맷은 다음과 같습니다.Settings = { "name": "hedge test", // Strategy parameter "args": [["Interval", 500]], // Strategy ID, which can be obtained with "GetStrategyList" method "strategy": 25189, // K-line period parameter "60" means 60 seconds "period": 60, // Specify on which docker to run; if the attribute is not written, it will be automatically assigned to run "node" : 51924, // Custom field "appid": "member2", "exchanges": [ // ZB; "pid" can be obtained by "GetPlatformList" method {"pid": 15445, "pair": "ETH_BTC"}, // OKEX; 2 exchange objects are configured {"pid": 13802, "pair": "BCH_BTC"}, // In addition to the platforms ("pid" identification) configured by the FMZ dashboard, you can also set exchange configuration information that has not been configured to operate the bot {"eid": "OKEX", "pair": "ETH_BTC", "meta" :{"AccessKey": "xxx", "SecretKey": "yyy"}}, {"eid": "Huobi", "pair": "BCH_BTC", "meta" :{"AccessKey": "xxx", "SecretKey": "yyy"}} ] }참고: 플랫폼과 같은 민감한 정보를 사용할 때
API KEY,"meta":{"AccessKey":"xxx","SecretKey":"yyy"}구성을 통해eid, FMZ가 데이터를 저장하지 않는다는 것을 알아야 합니다. 데이터는 직접 도커 프로그램에 전송됩니다. 그래서 이 정보는 bot이 생성되거나 다시 시작될 때마다 구성되어야 합니다.플러그인을 사용하여 교환을 지원하는 봇을 다시 시작하려면
Settings매개 변수, 당신은 다음 설정을 해야 합니다exchanges속성:{"eid": "Exchange", "label" : "testXXX", "pair": "ETH_BTC", "meta" :{"AccessKey": "123", "SecretKey": "1234", "Front" : "http://127.0.0.1:6666/XXX"}}label이 속성은 현재에 의해 액세스 교환 객체에 대한 라벨을 설정합니다.일반 프로토콜,exchange.GetLabel()전략의 역할입니다.
-
-
반환 값
{ "code": 0, "data": { // 1 means running "result": 1, "error": null } }
GetRobotDetail (로봇정보)
GetRobotDetail(RobotId)지정된 ID (로봇) 를 가진 로봇에 대한 자세한 정보를 얻습니다.ID: RobotId),API KEYFMZ 퀀트 거래 플랫폼 계정의 요청에
-
매개 변수
RobotId정수 타입입니다. 로봇은ID수록할 수 있습니다GetRobotList(...). -
반환 값
{ "code": 0, "data": { "result": { "robot": { // Next payment time, namely the effective cut-off time after the current payment "charge_time": 1561992608, // Elapsed Time "charged": 3600, // Amount consumed (0.125 CNY = 12500000 / 1e8) "consumed": 12500000, "date": "2019-07-01 21:50:08", "debug": "{\"Nano\":1561989722431145193,\"Stderr\":\"\",\"Stdout\":\"\"}", // Stop time "end_time": "2019-07-01 22:02:02", // The docker ID assigned when the robot is running; if it is automatic, the value is -1 "fixed_id": 85960, "id": 150288, "is_deleted": 0, // Whether it has the permission to manage the bot "is_manager": true, // Whether it is virtual exchange "is_sandbox": 0, // Robot name "name": "Spread monitoring2", // Docker ID "node_id": 85960, // The exchange objects configured by the robot "pexchanges": { // 14703 is eid, and "GateIO" is exchange name "14703": "GateIO", "15445": "ZB", "42960": "OKEX", "44314": "Huobi" }, // label information of the exchange object configured by the robot "plabels": { "14703": "Gate.IO (old name: BTER)", "15445": "ZB", "42960": "OKEX spot V3 test", "44314": "Huobi - newest test" }, "profit": 0, // Whether to show public "public": 0, // Recent active time "refresh": 1561989724000, "robot_args": "[[\"TickInterval\",500],[\"StrOnePair\",\"spot:Huobi:spot;spot:OKEX:spot;false;60;5;0;0\"],[\"StrTwoPair\",\"spot:ZB:spot;spot:GateIO:spot;false;60;5;0;0\"],[\"StrThreePair\",\"null\"],[\"StrFourPair\",\"null\"],[\"StrSixPair\",\"null\"],[\"StrFivePair\",\"null\"],[\"ResetChart\",false]]", "start_time": "2019-07-01 22:00:54", // Robot status "status": 4, "strategy_args": "[[\"TickInterval\",\"Detection frequency (ms)\",\"This is millisecond. Don't set it too small.\",500],[\"StrOnePair\",\"Combination1\",\"Spread Combination\",\"spot:Huobi:spot;spot:OKCoin:spot;false;60;5;0;0\"],[\"StrTwoPair\",\"Combination2\",\"Spread Combination\",\"future:Futures_OKCoin:this_week;spot:OKCoin:spot;false;60;5;0;0\"],[\"StrThreePair\",\"Combination3\",\"Spread Combination\",\"future:Futures_OKCoin:this_week;future:Futures_OKCoin:quarter;true;60;5;0;0\"],[\"StrFourPair\",\"Combination4\",\"Spread Combination\",\"null\"],[\"StrSixPair\",\"Combination6\",\"Combination\",\"null\"],[\"StrFivePair\",\"Combination5\",\"Combination\",\"null\"],[\"ResetChart\",\"whether to clear the previous chart\",\"clear the previous chart\",false]]", // Configured exchange objects, set trading pair information "strategy_exchange_pairs": "[60,[44314,42960,15445,14703],[\"BTC_USDT\",\"BTC_USDT\",\"ETH_USDT\",\"ETH_USDT\"]]", // Strategy ID "strategy_id": 21337, // Strategy's last modification time "strategy_last_modified": "2018-11-29 12:07:58", // Strategy name "strategy_name": "Digital currency spread monitoring and analysis", "summary": "Polling time consuming: 500ms\n`[{\"type\":\"table\",\"title\":\"pair basic data\",\"cols\":[\"ID\",\"NameA - NameB\",\"SymbolA - SymbolB\",\"UpdCycle\",\"isUSD\",\"Collect\"],\"rows\":[[\"0 \",\"Huobi/OKEX\",\"spot/spot\",60,false,\"612ms\"],[\"1 \",\"ZB/GateIO\",\"spot/spot\",60,false,\"501ms\"]]},{\"type\":\"table\",\"title\":\"pair market data\",\"cols\":[\"ID\",\"NameA - NameB\",\"SymbolA - SymbolB\",\"A_Bids1\",\"B_Asks1\",\"Plus\",\"A_Asks1\",\"B_Bids1\",\"Minus\"],\"rows\":[[\"0 \",\"Huobi/OKEX\",\"spot/spot\",10518.02,10525.1,-7.08,10520,10523,-3],[\"1 \",\"ZB/GateIO\",\"spot/spot\",285.68,286,-0.32,285.8,285.85,-0.05]]},{\"type\":\"table\",\"title\":\"pair statistical data\",\"cols\":[\"ID\",\"NameA - NameB\",\"SymbolA - SymbolB\",\"Maximum spread\",\"Minimum spread\",\"Mean positive premium\",\"Mean negative premium\"],\"rows\":[[\"0 \",\"Huobi/OKEX\",\"spot/spot\",0,-3,0,-1.47],[\"1 \",\"ZB/GateIO\",\"spot/spot\",0.03,-0.05,0.03,-0.05]]}]`\n", // Whether to enable offline alert "wd": 0 } }, "error": null } }이
summary반환된 데이터의 속성 (보트 상태 표시줄에 있는 정보; 10초 동안 캐시; 최신 데이터가 아닙니다) 는 현재 데이터 양 제한 (캐시 된 데이터) 을 가지고 있습니다. 데이터 양 제한은 200KB이며, 과도한 데이터가 줄여집니다. 더 많은 상태 표시줄 정보 데이터가 필요하다면,GetRobotLogs인터페이스를 얻을 때GetRobotLogs상태 표시줄, 필드 정보를 얻습니다summary가장 최근의 데이터입니다.)그 속성의 설명
strategy_exchange_pairs예를 들어 다음 자료를 들 수 있습니다.[60,[44314,42960,15445,14703],[\"BTC_USDT\",\"BTC_USDT\",\"ETH_USDT\",\"ETH_USDT\"]]첫 번째 자료
60bot에 의해 설정된 기본 K-라인 기간은 1분, 즉 60초입니다.[44314,42960,15445,14703]교환 대상이 됩니다.eid봇을 위해 구성된 것 (첨가 순서대로)[\"BTC_USDT\",\"BTC_USDT\",\"ETH_USDT\",\"ETH_USDT\"]bot에 의해 구성된 교환 객체에 대한 거래 쌍 세트입니다.eid).
GetAccount (계정)
GetAccount()회계 정보를 반환API KEYFMZ 퀀트 거래 플랫폼 계정의 요청에
-
매개 변수 아무 것도 없습니다
-
반환 값
{ "code": 0, "data": { "result": { "username": "littlelittledream", "level": 0, "consumed": 3235500000, "invitation_code": "1545967", "points": 25, // The value here, due to precision control, is expressed in integer. To convert it to actual value, you need to divide it by 1e8 (i.e. 10 to the 8th power), and the actual result here is: 65.421 "balance": 6542100000 }, "error": None } }
- Macd를 일간 시간표에 결합한 예가 있나요?
바다 신, 코인 거래소의 API 네트워크에 대해 물어보세요! - 후비 계약서 오류
- 영 모터가 작동하면 관리자가 무료 IBM 클라우드 파운드리에 배포 할 수 있습니까?
- Pandas 데이터베이스를 관리자에 설치하는 방법
- Exchange.IO를 실행하여 오류를 확인합니다.
- My 언어에서 bk, sk, 등등의 명령어들의 서열 수에 대한 문제
- 브린 벨트 지표 문제
- 오더 파라미터 오류가 발생하면 어떻게 디뷰를 할 수 있습니까?
- 사용자 정의 데이터 검색 오류 보고
- IP 벽이 설치되어 운영자가 정상적으로 작동하는 데 영향을 미치나요?
- 왜 OKex 선물의 K 라인은 최근 49개밖에 되지 않는가?
- 첫 번째 질문의 가치에 대한 질문입니다.
- 왜 K 라인 데이터에 접근할 수 없는 걸까요?
- 사용자 지정 데이터 소스가 다른 거래소를 지원하는지 재검토합니다.
- 자, 제가 쓴 RSI 수식에는 잘못된 부분이 있습니다.
- 디지털 화폐 주문 거래에서 사건이 발생했습니까?
- 비안 대회 역사 자료
- 재검토 시 init () 함수에서 동전 및 금액의 수를 동적으로 설정할 수 있습니까?
- 영구 계약은 사용할 수 없습니다.