Esquema de implementación de mensajes push de robot WeChat
El autor:La bondad, Creado: 2020-07-24 09:52:33, Actualizado: 2023-10-26 20:04:21
El grupo de WeChat es un lugar público donde se reúnen amigos de ideas afines, y el grupo de WeChat en el círculo comercial cuantitativo no es una excepción. Recientemente, muchos usuarios de FMZ preguntan cómo pueden enviar mensajes al grupo de WeChat. Por ejemplo, su estrategia envía una señal comercial, pero no quieren automatizar la transacción.
Por esta razón, probablemente miré la interfaz de WeChat y encontré que se necesita una cuenta oficial, lo que no es particularmente conveniente. Así que decidí tomar un enfoque diferente y probé las siguientes soluciones. Debido a la capacidad limitada de mí, solo se puede completar la función más básica de este requisito, y es solo para referencia.
Plan de ejecución
Decidí usar Golang para escribir, necesito usar una biblioteca Golanggithub.com/go-vgo/robotgo, básicamente los requisitos de la solución se logra por esta biblioteca.
Primero ejecutamos un programa de servicio en nuestra computadora, el código es el siguiente:
package main
import (
"fmt"
"time"
"github.com/go-vgo/robotgo"
"net/http"
"io/ioutil"
)
func postMsg (msg string) {
fmt.Println("Start the mission!")
// process ids
processIds := "WeChat"
fpid, err3 := robotgo.FindIds(processIds)
robotgo.ActivePID(fpid[0])
time.Sleep(time.Millisecond * 2000)
if err3 == nil {
fmt.Println(fmt.Sprintf("find %s", processIds), "ids:", fpid)
/* Use image recognition method to get the coordinates of the click area
arrPicFileName := []string{"pic1.png", "pic2.png", "pic3.png"}
for _, name := range arrPicFileName {
picPath := fmt.Sprintf("/xxx/xxx/Desktop/xxx/%s", name)
fmt.Println("picPath:", fmt.Sprintf("/xxx/xxx/Desktop/xxx/%s", name))
fx, fy := robotgo.FindPic(picPath)
fmt.Println("move to :", fx+10, fy+10)
robotgo.MoveMouseSmooth(fx+10, fy+10)
time.Sleep(time.Millisecond * 2000)
robotgo.MouseClick("left", false)
robotgo.TypeStr(msg)
time.Sleep(time.Second)
robotgo.KeyTap("enter")
time.Sleep(time.Second)
}
*/
// /* Fixed area coordinates, the coordinates of the upper right corner of the screen are 0,0
arrArea := []map[string]int{
map[string]int{
"x" : 190,
"y" : 200,
},
map[string]int{
"x" : 190,
"y" : 200+70,
},
map[string]int{
"x" : 190,
"y" : 200+70+70,
},
}
for _, area := range arrArea {
robotgo.MoveMouseSmooth(area["x"], area["y"])
time.Sleep(time.Millisecond * 2000)
robotgo.MouseClick("left", false)
robotgo.TypeStr(msg)
time.Sleep(time.Second)
robotgo.KeyTap("enter")
time.Sleep(time.Second)
}
// */
}
fmt.Println("The mission is complete!")
}
func Handle (w http.ResponseWriter, r *http.Request) {
b, err := ioutil.ReadAll(r.Body)
if err != nil {
panic(err)
}
fmt.Println("req body:", string(b))
postMsg(string(b))
w.Write([]byte("finished!"))
}
func main () {
fmt.Println("listen http://127.0.0.1:9090")
http.HandleFunc("/data", Handle)
http.ListenAndServe("127.0.0.1:9090", nil)
}
La función de este programa de servicio es esperar la solicitud.postMsgfunción para realizar una serie de clics simulados de movimiento del ratón y operaciones de entrada para abrir la ventana del software de WeChat, hacer clic en el área predefinida, ingresar la información en la solicitud y enviar al grupo de WeChat.
Haga clic en el área en la ventana de WeChat para confirmar y probar dos escenarios. El primero es guardar la imagen del nombre del grupo de WeChat, cargar la pantalla de comparación de imágenes cuandopostMsgLa velocidad de reconocimiento de este método no es muy alta, y a veces no se puede reconocer. Por lo tanto, se utiliza la segunda solución, que es más confiable. Es fijar el área de clic y planificar un conjunto de coordenadas del área de clic, es decir: las coordenadas registradas por elarrArea¿Dónde están las coordenadas? Respuesta: Mira las coordenadas de píxeles de la captura de pantalla y mide T_T.
Programa de pruebas de estrategia de la plataforma FMZ:
function main() {
var msg = {
"type" : "msg",
"robotId" : _G(),
"msg" : "hello fmz!"
}
var n = 0
while(true) {
if(n == 20) {
var ret = HttpQuery("http://127.0.0.1:9090/data", JSON.stringify(msg))
Log("Exit")
break
}
n++
LogStatus(_D(), "n:", n)
Sleep(1000)
}
}
Esta estrategia simula el envío de una señal de transacción (cuando n==20, asumiendo que la señal de transacción se activa en este momento, y se considera posible el comercio), envía una solicitud al servicio local enhttp://127.0.0.1:9090/data.
Prueba
La operación del robot FMZ (el docker también se ejecuta localmente):

Ventana de WeChat

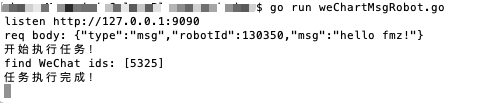
El mensaje de empuje es:
{"type":"msg","robotId":130350,"msg":"hello fmz!"}
Este plan es sólo para empezar, y si tienes un plan mejor, eres bienvenido a discutirlo.
- Práctica cuantitativa de los intercambios DEX (2) -- Guía de usuario de hiperlíquidos
- Prácticas de cuantificación en el mercado DEX ((2) -- Guía de uso de Hyperliquid
- Práctica cuantitativa de los intercambios DEX (1) -- Guía de usuario de dYdX v4
- Introducción al arbitraje de lead-lag en criptomonedas (3)
- Prácticas de cuantificación de las bolsas DEX ((1) -- dYdX v4 Guía de uso
- Introducción al conjunto de Lead-Lag en las monedas digitales (3)
- Introducción al arbitraje de lead-lag en criptomonedas (2)
- Introducción al conjunto de Lead-Lag en las monedas digitales (2)
- Discusión sobre la recepción de señales externas de la plataforma FMZ: una solución completa para recibir señales con servicio HTTP incorporado en la estrategia
- Exploración de la recepción de señales externas de la plataforma FMZ: estrategias para una solución completa de recepción de señales de servicios HTTP integrados
- Introducción al arbitraje de lead-lag en criptomonedas (1)
- Hans123 estrategia de despliegue intradiario
- Las estrategias de opciones de moneda digital retrospectivas
- Alarma TradingViewWebHook conectada directamente al robot FMZ
- Añadir un despertador a la estrategia de negociación
- Estrategia de cobertura de contratos de futuros de OKEX mediante el uso de C++
- Estrategia de negociación basada en el flujo activo de fondos
- Utilice el complemento de terminal de negociación para facilitar la negociación manual
- Estrategia de negociación de tasas de tipo cuantitativas
- Estrategia de equilibrio y estrategia de red
- Solución de intercambio de cotizaciones de mercado multi-robot
- Estrategias de equilibrio y estrategias de red
- Estrategia de negociación gráfica de Martingale
- Python versión de la estrategia de la comisión iceberg
- La lógica del comercio de futuros de criptomonedas
- Estrategia ZDZB en forma de fondo
- Soluciones compartidas para el mercado de múltiples robots
- Modelado y análisis de la volatilidad de Bitcoin basado en el modelo ARMA-EGARCH
- Solución del problema de precisión del cálculo numérico en el diseño de estrategias JavaScript
- Le enseño a encapsular una estrategia de Python en un archivo local
- El comercio en FMEX desbloquea la optimización óptima del volumen de pedidos Parte 2