로봇 WeChat 메시지 푸시 구현 계획
저자:선함, 2020-07-24 09:52:33, 업데이트: 2023-10-26 20:04:21
웨이
이러한 이유로, 나는 아마도 WeChat 인터페이스를 살펴보고 공식 계정이 필요하다는 것을 발견했습니다. 이것은 특별히 편리하지 않습니다. 그래서 나는 다른 접근 방식을 취하고 다음 솔루션을 시도하기로 결정했습니다. 나의 제한된 용량으로 인해이 요구 사항의 가장 기본적인 기능만 완료 할 수 있으며, 그것은 참조만을위한 것입니다.
시행계획
저는 글쓰기 위해 골랑을 사용하기로 결정했습니다. 골랑 도서관을 사용해야 합니다.github.com/go-vgo/robotgo, 기본적으로 이 라이브러리가 솔루션의 요구 사항을 달성합니다.
먼저 컴퓨터에서 서비스 프로그램을 실행합니다. 코드는 다음과 같습니다.
package main
import (
"fmt"
"time"
"github.com/go-vgo/robotgo"
"net/http"
"io/ioutil"
)
func postMsg (msg string) {
fmt.Println("Start the mission!")
// process ids
processIds := "WeChat"
fpid, err3 := robotgo.FindIds(processIds)
robotgo.ActivePID(fpid[0])
time.Sleep(time.Millisecond * 2000)
if err3 == nil {
fmt.Println(fmt.Sprintf("find %s", processIds), "ids:", fpid)
/* Use image recognition method to get the coordinates of the click area
arrPicFileName := []string{"pic1.png", "pic2.png", "pic3.png"}
for _, name := range arrPicFileName {
picPath := fmt.Sprintf("/xxx/xxx/Desktop/xxx/%s", name)
fmt.Println("picPath:", fmt.Sprintf("/xxx/xxx/Desktop/xxx/%s", name))
fx, fy := robotgo.FindPic(picPath)
fmt.Println("move to :", fx+10, fy+10)
robotgo.MoveMouseSmooth(fx+10, fy+10)
time.Sleep(time.Millisecond * 2000)
robotgo.MouseClick("left", false)
robotgo.TypeStr(msg)
time.Sleep(time.Second)
robotgo.KeyTap("enter")
time.Sleep(time.Second)
}
*/
// /* Fixed area coordinates, the coordinates of the upper right corner of the screen are 0,0
arrArea := []map[string]int{
map[string]int{
"x" : 190,
"y" : 200,
},
map[string]int{
"x" : 190,
"y" : 200+70,
},
map[string]int{
"x" : 190,
"y" : 200+70+70,
},
}
for _, area := range arrArea {
robotgo.MoveMouseSmooth(area["x"], area["y"])
time.Sleep(time.Millisecond * 2000)
robotgo.MouseClick("left", false)
robotgo.TypeStr(msg)
time.Sleep(time.Second)
robotgo.KeyTap("enter")
time.Sleep(time.Second)
}
// */
}
fmt.Println("The mission is complete!")
}
func Handle (w http.ResponseWriter, r *http.Request) {
b, err := ioutil.ReadAll(r.Body)
if err != nil {
panic(err)
}
fmt.Println("req body:", string(b))
postMsg(string(b))
w.Write([]byte("finished!"))
}
func main () {
fmt.Println("listen http://127.0.0.1:9090")
http.HandleFunc("/data", Handle)
http.ListenAndServe("127.0.0.1:9090", nil)
}
이 서비스 프로그램의 기능은 요청을 기다리는 것입니다. 요청을 받은 후,postMsg함수는 WeChat 소프트웨어 창을 열고 미리 정의된 영역을 클릭하고 요청에 정보를 입력하고 WeChat 그룹으로 전송하는 일련의 모의 마우스 움직임 클릭과 입력 작업을 수행합니다.
두 가지 시나리오를 확인하고 테스트하기 위해 WeChat 창의 영역을 클릭합니다. 첫 번째는 WeChat 그룹의 이름 이미지를 저장하는 것입니다.postMsg이 방법의 인식 비율은 매우 높지 않으며 때로는 인식 할 수 없습니다. 그래서 두 번째 솔루션을 사용합니다. 그것은 더 신뢰할 수 있습니다. 클릭 영역을 고정하고 클릭 영역의 좌표 집합을 계획합니다. 즉:arrArea위의 코드에서 변수. 좌표는 어디에 있습니까? 답: 스크린샷의 픽셀 좌표를 보고 T_T를 측정합니다.
FMZ 플랫폼 전략 테스트 프로그램:
function main() {
var msg = {
"type" : "msg",
"robotId" : _G(),
"msg" : "hello fmz!"
}
var n = 0
while(true) {
if(n == 20) {
var ret = HttpQuery("http://127.0.0.1:9090/data", JSON.stringify(msg))
Log("Exit")
break
}
n++
LogStatus(_D(), "n:", n)
Sleep(1000)
}
}
이 전략은 트랜잭션 신호를 전송하는 것을 시뮬레이션합니다. (n==20가 되면, 트랜잭션 신호가 이 시간에 트리거되고 거래가 가능하다고 생각되는 경우) 로컬 서비스에 요청을 보내서http://127.0.0.1:9090/data.
테스트
FMZ 로봇 동작 (도커 또한 로컬로 실행):

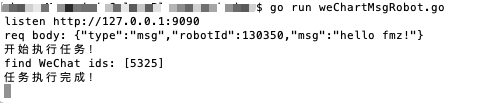
웨이

푸시 메시지는:
{"type":"msg","robotId":130350,"msg":"hello fmz!"}
이 계획은 시작일 뿐이고, 더 좋은 계획이 있다면, 토론할 수 있습니다.
- DEX 거래소의 양적 관행 (2) -- 하이퍼 액성 사용자 가이드
- DEX 거래소 정량화 연습 ((2)-- Hyperliquid 사용 지침
- DEX 거래소의 양적 관행 (1) -- dYdX v4 사용자 안내
- 암호화폐의 리드-래그 중재에 대한 소개 (3)
- DEX 거래소 정량화 연습 ((1)-- dYdX v4 사용 설명서
- 디지털 화폐의 리드-래그 스위트 소개 (3)
- 암호화폐의 리드-래그 중재에 대한 소개 (2)
- 디지털 화폐의 리드-래그 스위트 소개 (2)
- FMZ 플랫폼의 외부 신호 수신에 대한 논의: 전략 내 내장 Http 서비스와 함께 신호 수신에 대한 완전한 솔루션
- FMZ 플랫폼 외부 신호 수신에 대한 탐구: 전략 내장 HTTP 서비스 신호 수신의 전체 방안
- 암호화폐의 리드-래그 중재에 대한 소개 (1)
- hans123 내일 돌파구 전략
- 디지털 화폐 옵션 전략 초기 탐색
- TradingViewWebHook 알람 FMZ 로봇에 직접 연결
- 거래 전략에 알람 시계를 추가
- C++를 이용한 OKEX 선물계약 헤지 전략
- 액티브 자금 흐름에 기반한 거래 전략
- 거래 터미널 플러그인을 사용 하 여 수동 거래를 촉진
- 양적 타이핑 가격 거래 전략
- 균형 전략과 네트워크 전략
- 다중 로봇 시장 코팅 공유 솔루션
- 균형 전략과 격자 전략에 대한 자세한 설명
- 그래픽 마틴게일 거래 전략
- 파이썬 버전 아이스버그 위원회 전략
- 암호화폐 선물 거래의 논리
- 아래 모양 ZDZB 전략
- 다중 로봇 시장 공유 솔루션
- ARMA-EGARCH 모델을 기반으로 비트코인 변동률 모델링 및 분석
- 자바스크립트 전략 설계에서 수치 계산 정확성 문제 해결
- 로컬 파일로 파이썬 전략을 캡슐화하는 법을 가르쳐
- FMEX 거래는 최적의 주문량 최적화를 해제합니다