Esquema de implementação de mensagens push do robot WeChat
Autora:Bem-estar, Criado: 2020-07-24 09:52:33, Atualizado: 2023-10-26 20:04:21
O grupo WeChat é um lugar público onde amigos de ideias semelhantes se reúnem, e o grupo WeChat no círculo de negociação quantitativa não é exceção. Recentemente, muitos usuários FMZ perguntam como podem enviar mensagens para o grupo WeChat. Por exemplo, sua estratégia envia um sinal de negociação, mas eles não querem automatizar a transação. Eles esperam que o sinal fornecido pelo robô possa ser enviado para o grupo WeChat como referência.
Por essa razão, eu provavelmente olhei para a interface do WeChat e descobri que uma conta oficial é necessária, o que não é particularmente conveniente. Então eu decidi tomar uma abordagem diferente e tentei as seguintes soluções. Devido à capacidade limitada de mim, apenas a função mais básica deste requisito pode ser concluída, e é apenas para referência.
Plano de execução
Eu decidi usar Golang para escrever, preciso usar uma biblioteca Golanggithub.com/go-vgo/robotgo, basicamente os requisitos da solução é alcançado por esta biblioteca.
Primeiro, executamos um programa de serviço no nosso computador, o código é o seguinte:
package main
import (
"fmt"
"time"
"github.com/go-vgo/robotgo"
"net/http"
"io/ioutil"
)
func postMsg (msg string) {
fmt.Println("Start the mission!")
// process ids
processIds := "WeChat"
fpid, err3 := robotgo.FindIds(processIds)
robotgo.ActivePID(fpid[0])
time.Sleep(time.Millisecond * 2000)
if err3 == nil {
fmt.Println(fmt.Sprintf("find %s", processIds), "ids:", fpid)
/* Use image recognition method to get the coordinates of the click area
arrPicFileName := []string{"pic1.png", "pic2.png", "pic3.png"}
for _, name := range arrPicFileName {
picPath := fmt.Sprintf("/xxx/xxx/Desktop/xxx/%s", name)
fmt.Println("picPath:", fmt.Sprintf("/xxx/xxx/Desktop/xxx/%s", name))
fx, fy := robotgo.FindPic(picPath)
fmt.Println("move to :", fx+10, fy+10)
robotgo.MoveMouseSmooth(fx+10, fy+10)
time.Sleep(time.Millisecond * 2000)
robotgo.MouseClick("left", false)
robotgo.TypeStr(msg)
time.Sleep(time.Second)
robotgo.KeyTap("enter")
time.Sleep(time.Second)
}
*/
// /* Fixed area coordinates, the coordinates of the upper right corner of the screen are 0,0
arrArea := []map[string]int{
map[string]int{
"x" : 190,
"y" : 200,
},
map[string]int{
"x" : 190,
"y" : 200+70,
},
map[string]int{
"x" : 190,
"y" : 200+70+70,
},
}
for _, area := range arrArea {
robotgo.MoveMouseSmooth(area["x"], area["y"])
time.Sleep(time.Millisecond * 2000)
robotgo.MouseClick("left", false)
robotgo.TypeStr(msg)
time.Sleep(time.Second)
robotgo.KeyTap("enter")
time.Sleep(time.Second)
}
// */
}
fmt.Println("The mission is complete!")
}
func Handle (w http.ResponseWriter, r *http.Request) {
b, err := ioutil.ReadAll(r.Body)
if err != nil {
panic(err)
}
fmt.Println("req body:", string(b))
postMsg(string(b))
w.Write([]byte("finished!"))
}
func main () {
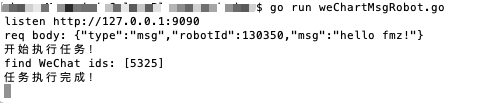
fmt.Println("listen http://127.0.0.1:9090")
http.HandleFunc("/data", Handle)
http.ListenAndServe("127.0.0.1:9090", nil)
}
A função deste programa de serviço é esperar pela solicitação.postMsgfunção para executar uma série de cliques de movimento do mouse simulados e operações de entrada para abrir a janela do software WeChat, clicar na área predefinida, inserir as informações na solicitação e enviar para o grupo WeChat.
Clique na área na janela do WeChat para confirmar e testar dois cenários.postMsgA taxa de reconhecimento deste método não é muito alta, e às vezes não pode ser reconhecida. Portanto, a segunda solução é usada, que é mais confiável. É fixar a área de clique e planejar um conjunto de coordenadas da área de clique, ou seja: as coordenadas registradas peloarrAreaonde estão as coordenadas? Resposta: Olhe para as coordenadas de pixels da captura de tela e meça T_T.
O programa de teste da estratégia da plataforma FMZ:
function main() {
var msg = {
"type" : "msg",
"robotId" : _G(),
"msg" : "hello fmz!"
}
var n = 0
while(true) {
if(n == 20) {
var ret = HttpQuery("http://127.0.0.1:9090/data", JSON.stringify(msg))
Log("Exit")
break
}
n++
LogStatus(_D(), "n:", n)
Sleep(1000)
}
}
Esta estratégia simula o envio de um sinal de transação (quando n==20, assumindo que o sinal de transação é acionado neste momento, e é considerado possível negociar), ele envia uma solicitação para o serviço local emhttp://127.0.0.1:9090/data.
Teste
A operação do robô FMZ (o docker também é executado localmente):

Janela do WeChat

A mensagem é:
{"type":"msg","robotId":130350,"msg":"hello fmz!"}
Este plano é apenas para começar, e se tiverem um plano melhor, são bem-vindos para o discutir.
- Prática quantitativa das bolsas DEX (2) -- Guia do utilizador do hiperlíquido
- Práticas de quantificação da DEX Exchange ((2) -- Guia de uso do Hyperliquid
- Prática quantitativa das bolsas DEX (1) -- dYdX v4 Guia do utilizador
- Introdução à arbitragem de lead-lag em criptomoedas (3)
- Práticas de quantificação da DEX exchange ((1) -- dYdX v4 Guia de uso
- Introdução ao conjunto de Lead-Lag na moeda digital (3)
- Introdução à arbitragem de lead-lag em criptomoedas (2)
- Introdução ao suporte de Lead-Lag na moeda digital (2)
- Discussão sobre a recepção de sinais externos da plataforma FMZ: uma solução completa para receber sinais com serviço HTTP em estratégia
- Discussão da recepção de sinais externos da plataforma FMZ: estratégias para o sistema completo de recepção de sinais do serviço HTTP embutido
- Introdução à arbitragem de lead-lag em criptomoedas (1)
- Hans123 estratégia de avanço intradiário
- Estratégia de opções de moeda digital retrospectiva
- Alarme TradingViewWebHook ligado diretamente ao robô FMZ
- Adicionar um despertador à estratégia de negociação
- Estratégia de cobertura de contratos futuros da OKEX utilizando C++
- Estratégia de negociação baseada no fluxo activo de fundos
- Utilize o plug-in do terminal de negociação para facilitar a negociação manual
- Estratégia de negociação de taxas de digitação quantitativa
- Estratégia de equilíbrio e estratégia de rede
- Solução de partilha de cotações de mercado com vários robôs
- Estratégias de equilíbrio e estratégias de grelha
- Estratégia de negociação gráfica de Martingale
- Python versão estratégia da comissão iceberg
- A lógica da negociação de futuros de criptomoedas
- Forma inferior da estratégia ZDZB
- Soluções de partilha de mercado multi-robô
- Modelagem e análise da volatilidade do Bitcoin com base no modelo ARMA-EGARCH
- Solução do problema de precisão de cálculo numérico no projeto de estratégia JavaScript
- Ensinar a encapsular uma estratégia Python em um arquivo local
- A negociação na FMEX permite a otimização do volume de encomendas Parte 2