Робот WeChat сообщение пуш схема реализации
Автор:Доброта, Создано: 2020-07-24 09:52:33, Обновлено: 2023-10-26 20:04:21
Группа WeChat - это общественное место, где собираются единомышленники, и группа WeChat в количественном торговом кругу не является исключением.
По этой причине, я, вероятно, посмотрел на интерфейс WeChat и обнаружил, что нужна официальная учетная запись, что не особенно удобно. Поэтому я решил принять другой подход и попробовал следующие решения. Из-за моей ограниченной возможности можно выполнить только самую основную функцию этого требования, и это только для справки.
План осуществления
Я решил использовать Голанг для написания, нужно использовать Голанг библиотекиgithub.com/go-vgo/robotgo, в основном требования решения достигается этой библиотекой.
Сначала мы запускаем сервисную программу на нашем компьютере, код следующий:
package main
import (
"fmt"
"time"
"github.com/go-vgo/robotgo"
"net/http"
"io/ioutil"
)
func postMsg (msg string) {
fmt.Println("Start the mission!")
// process ids
processIds := "WeChat"
fpid, err3 := robotgo.FindIds(processIds)
robotgo.ActivePID(fpid[0])
time.Sleep(time.Millisecond * 2000)
if err3 == nil {
fmt.Println(fmt.Sprintf("find %s", processIds), "ids:", fpid)
/* Use image recognition method to get the coordinates of the click area
arrPicFileName := []string{"pic1.png", "pic2.png", "pic3.png"}
for _, name := range arrPicFileName {
picPath := fmt.Sprintf("/xxx/xxx/Desktop/xxx/%s", name)
fmt.Println("picPath:", fmt.Sprintf("/xxx/xxx/Desktop/xxx/%s", name))
fx, fy := robotgo.FindPic(picPath)
fmt.Println("move to :", fx+10, fy+10)
robotgo.MoveMouseSmooth(fx+10, fy+10)
time.Sleep(time.Millisecond * 2000)
robotgo.MouseClick("left", false)
robotgo.TypeStr(msg)
time.Sleep(time.Second)
robotgo.KeyTap("enter")
time.Sleep(time.Second)
}
*/
// /* Fixed area coordinates, the coordinates of the upper right corner of the screen are 0,0
arrArea := []map[string]int{
map[string]int{
"x" : 190,
"y" : 200,
},
map[string]int{
"x" : 190,
"y" : 200+70,
},
map[string]int{
"x" : 190,
"y" : 200+70+70,
},
}
for _, area := range arrArea {
robotgo.MoveMouseSmooth(area["x"], area["y"])
time.Sleep(time.Millisecond * 2000)
robotgo.MouseClick("left", false)
robotgo.TypeStr(msg)
time.Sleep(time.Second)
robotgo.KeyTap("enter")
time.Sleep(time.Second)
}
// */
}
fmt.Println("The mission is complete!")
}
func Handle (w http.ResponseWriter, r *http.Request) {
b, err := ioutil.ReadAll(r.Body)
if err != nil {
panic(err)
}
fmt.Println("req body:", string(b))
postMsg(string(b))
w.Write([]byte("finished!"))
}
func main () {
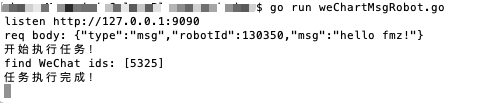
fmt.Println("listen http://127.0.0.1:9090")
http.HandleFunc("/data", Handle)
http.ListenAndServe("127.0.0.1:9090", nil)
}
Функция этой программы обслуживания заключается в том, чтобы ждать запрос.postMsgфункция выполнения серии имитируемых кликнов движения мыши и ввода операций для открытия окна программного обеспечения WeChat, нажатия на заранее определенную область, ввода информации в запрос и отправки в группу WeChat.
Нажмите на область в окне WeChat, чтобы подтвердить и протестировать два сценария. Первый - сохранить имя изображения группы WeChat, загрузить экран сравнения изображений, когдаpostMsgВ этом случае, если вы используете этот метод, вы можете найти координаты для клика. Уровень распознавания этого метода не очень высок, и иногда он не может быть распознан. Поэтому используется второе решение, которое более надежно. Это фиксировать область клика и планировать набор координат области клика, то есть: координаты, записанныеarrAreaОтвет: Посмотрите на координаты пикселей экрана и измерьте T_T.
Программа испытаний стратегии платформы FMZ:
function main() {
var msg = {
"type" : "msg",
"robotId" : _G(),
"msg" : "hello fmz!"
}
var n = 0
while(true) {
if(n == 20) {
var ret = HttpQuery("http://127.0.0.1:9090/data", JSON.stringify(msg))
Log("Exit")
break
}
n++
LogStatus(_D(), "n:", n)
Sleep(1000)
}
}
Эта стратегия имитирует отправку транзакционного сигнала (когда n==20, предполагая, что транзакционный сигнал запускается в это время, и считается возможным торговать), она отправляет запрос в местный сервис по адресуhttp://127.0.0.1:9090/data.
Испытание
Операция робота FMZ (докер также работает локально):

Окно WeChat

Нажмите на сообщение:
{"type":"msg","robotId":130350,"msg":"hello fmz!"}
Этот план - только начало, и если у вас есть план получше, вы можете обсудить его.
- Количественная практика DEX-бирж (2) -- Гипержидкое руководство пользователя
- ДЕКС (DEX Exchange) Количественная практика ((2) -- Гиперликвид (Hyperliquid)
- Количественная практика обмена DEX (1) -- руководство пользователя dYdX v4
- Введение в арбитраж с задержкой свинца в криптовалюте (3)
- DEX обмены количественные практики ((1) -- dYdX v4 Руководство пользователя
- Презентация о своде Lead-Lag в цифровой валюте (3)
- Введение в арбитраж с задержкой свинца в криптовалюте (2)
- Презентация о своде Lead-Lag в цифровой валюте (2)
- Обсуждение по внешнему приему сигналов платформы FMZ: полное решение для приема сигналов с встроенным сервисом Http в стратегии
- Обзор приема внешних сигналов на платформе FMZ: стратегию полного решения приема сигналов встроенного сервиса HTTP
- Введение в арбитраж с задержкой свинца в криптовалюте (1)
- hans123 Стратегия прорыва внутридневного использования
- Стратегия опционов на цифровые валюты
- Тревога TradingViewWebHook напрямую подключена к роботу FMZ
- Добавьте будильник к торговой стратегии
- Стратегия хеджирования фьючерсных контрактов OKEX с использованием C++
- Стратегия торговли, основанная на активном потоке средств
- Использование плагина торгового терминала для облегчения ручной торговли
- Стратегия торговли количественными ставками типографии
- Стратегия баланса и стратегия сети
- Решение для совместного использования котировок на рынке с использованием нескольких роботов
- Подробная информация о стратегии сбалансированности и стратегии сетки
- Графическая стратегия торговли мартингейлом
- Python версия стратегии комиссии айсберга
- Логика торговли криптовалютными фьючерсами
- Нижняя форма стратегии ZDZB
- Разделение решений в сфере робототехники
- Моделирование и анализ волатильности биткоина на основе модели ARMA-EGARCH
- Решение проблемы точности численного расчета в дизайне стратегии JavaScript
- Научить вас, чтобы инкапсулировать стратегию Python в локальном файле
- Торговля на FMEX позволяет оптимизировать объем заказов Часть 2