JSでFMZ拡張APIを学ぶ
作者: リン・ハーンオーク量化, 作成日:2020-05-16 18:04:17, 更新日:2024-12-10 20:29:45
履歴書
こんにちは,私は
この記事の記事一覧 開発者がJS言語でFMZの拡張APIを接続する方法. ケース1:拡張APIのCommandRobot方法を使用して,大盤ロボットと他のロボットの間のメッセージ通信を監視する. ケース2:拡張APIのGetRobotDetail方法を使用して,複数のロボットのデータの統一監視と表示を実現する.
1 JSでFMZを接続する拡張API
1) ・アクセスキーとシークレットキー (以下,AK,SK) を申請する.
FMZのウェブサイトのキーのアカウントを設定すると,キーのメニューでアプリケーションを作成し,AK,SKのセットにアクセスして記録します. (FMZのAK,SKは,取引所として初めて作成されるものとは異なり,FMZでは,APIキーのメニューでいつでもAK,SKの全データを閲覧することができます.)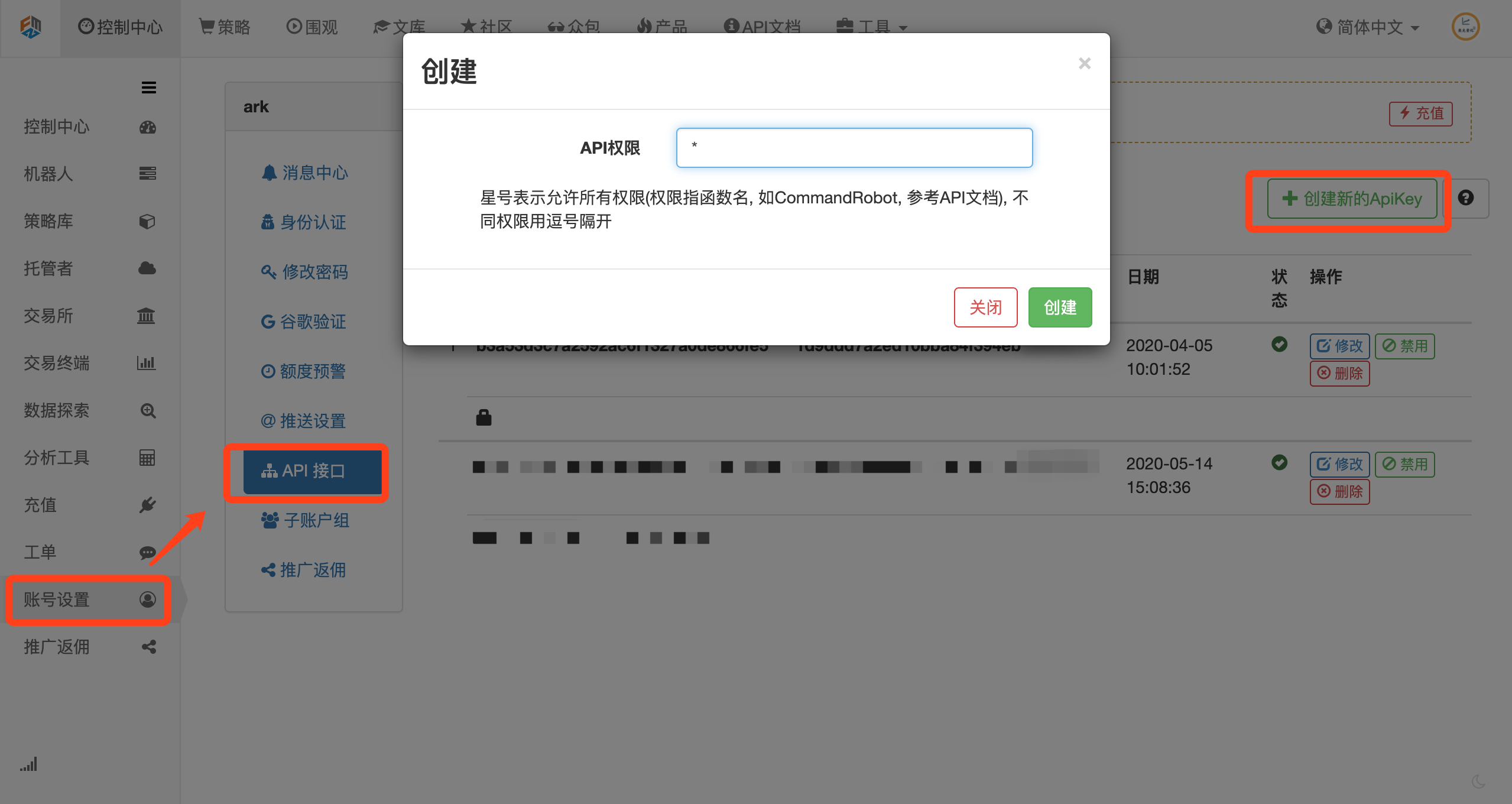
2) 拡張APIのドキュメントに基づいて開発 まず,APIの要求のいくつかの重要なステップを見てみましょう. 1 FMZ API インターフェース:
https://www.fmz.com/api/v1
2 基本的なパラメータを要求する
{
'version' : '1.0', //自定义版本号
'access_key': '8a148320e0bxxxxxxxxxxxxxx19js99f', //AK
'method' : 'GetNodeList', //具体调用的方法
'args' : [], //具体method算法的参数列表
'nonce' : 1516292399361, //时间戳,单位毫秒
'sign' : '085b63456c93hfb243a757366600f9c2' //签名(需要根据上面5个参数加密获取,下面有讲)
}
3, 完全な要求URLは,質問番号の送信形式で拼写されます
以GetNodeList方法为例
https://www.fmz.com/api/v1?
access_key=8a148320e0bxxxxxxxxxxxxxx19js99f&
nonce=1516292399361&
args=%5B%5D&
sign=085b63456c93hfb243a757366600f9c2&
version=1.0&
method=GetNodeList
4 署名方法
按照如下顺序进行参数拼接后,使用MD5加密算法加密字符串,并转换为十六进制数据字符串值,该值作为参数sign的值。
version + "|" + method + "|" + args + "|" + nonce + "|" + secretKey
5, 合計すると,次のコードがあります.
ソースアドレス:ワオク量化
var URL = "https://www.fmz.com/api/v1?";
var AK = "b3a53d3XXXXXXXXXXXXXXXXXXX866fe5";//这里替换成你自己的AccessKey
var SK = "1d9ddd7XXXXXXXXXXXXXXXXXXX85be17";//这里替换成你自己的SecretKey
function main() {
//获取5个基础参数对象
var param = getParam("1.0.0",AK,getArgs());
Log("param:",param);
//获取拼接参数md5加密后的结果
var md5Result = md5(param);
//赋值加密结果到基础参数对象中
param.sign = md5Result;
//获取请求api的URL
var finalUrl = getFinalUrl(param);
Log("finalUrl:",finalUrl);
//执行请求并打印结果
var info = HttpQuery(finalUrl);
Log("info:",info);
}
//获取基础5个参数的对象
function getParam(version,ak,args){
return {
'version': version,
'access_key': ak,
'method': 'GetNodeList',
'args': JSON.stringify(args),
'nonce': new Date().getTime()
}
}
//执行md5加密
function md5(param){
var paramUrl = param.version+"|"+param.method+"|"+param.args+"|"+param.nonce+"|"+SK
Log("paramUrl:",paramUrl);
return Hash("md5", "hex", paramUrl)
}
//获取最终请求URL
function getFinalUrl(param){
return URL+"access_key="+AK+"&nonce="+param.nonce+"&args="+param.args+"&sign="+param.sign+"&version="+param.version+"&method="+param.method;
}
//js中不支持...args的命名方式,所以改用arguments关键字获取参数数组
function getArgs(){
return [].slice.call(arguments);
}
ケース2:拡張APIのCommandRobot方法を使用してロボット間のメッセージ通信を実現
上のコードに基づいて,私たちはCommandRobot方法を使ってロボット間のメッセージ通信を実現しました.
この方法の2つのパラメータを見てみましょう.
| パラメータ名 | タイプ | 意味 |
|---|---|---|
| ロボットId | int | ロボットIDは,GetRobotList (......) で取得したり,ロボット詳細ページで取得したりできます. |
| Cmd | 文字列 | ロボットへのメッセージ |
参数の意味が分かれば,この呼び方を実行します.
1 ロボットの詳細ページで ロボットID を取得します.
2, cmd メッセージの取得方法を実装する
//获取消息头信息
function getMessageBody(toUserName,msgType,content){
return ({
"toUserName":toUserName,//发送给谁
"fromUserName":AOKE_INFO,//消息来源
"createTime": new Date().getTime(),//当前时间戳
"msgType":msgType,//消息类型
"content":content,//消息内容
"msgId":Math.random().toString(36).slice(-8)//消息ID
})
}
//获取消息体趋势信息(消息头content字段的数据)
function getCtaDate(symbol,timeCycle,direction,nowCycleTime){
return {
"symbol":symbol,//交易币种
"timeCycle":timeCycle,//趋势周期
"direction":direction,//当前进入的方向,0:看空,1:看多
"createTime":new Date().getTime(),//当前时间戳
"nowCycleTime":nowCycleTime//当前进入的周期起始时间
}
}
3 メッセージ送信コードを変更する
//发送消息前先获取消息
var sendMessage = getMessageBody("测试对象",'CTARemind',getCtaDate('BTC_USDT','120','0','2020-05-1620:00:00'));
//把机器人ID和消息体通过getArgs()方法获取,并传入基础参数。
var param = getParam("1.0.0",AK,getArgs(17777,sendMessage));
4、 main メソッドを実行し,メッセージを送信した後,GetCommand ((() メソッドでメッセージを取得する
function main(){
while(true) {
var cmd = GetCommand()
if (cmd) {
Log(cmd)
}
Sleep(1000)
}
}
メッセージ送信成功: メールの受信は成功しました:
メールの受信は成功しました: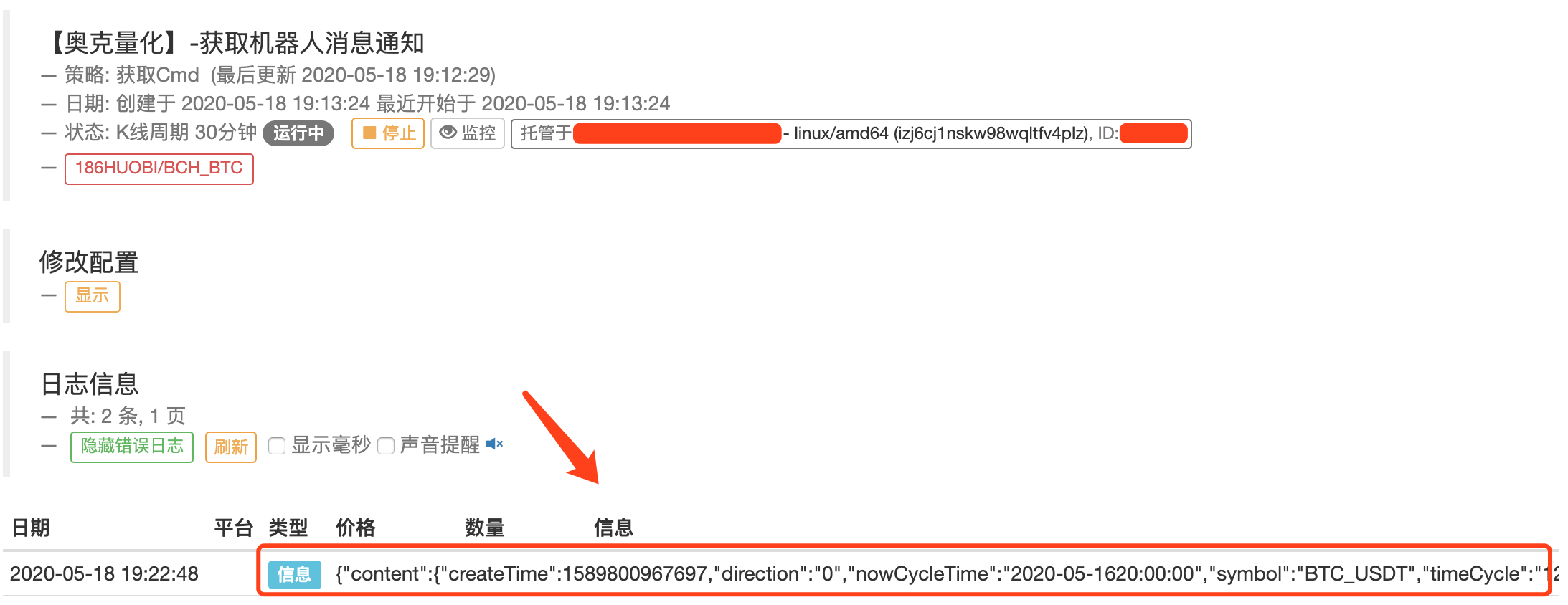
例3:拡張APIのGetRobotListとGetRobotDetailの方法を使用してロボットによるデータ監視と表示を実現する.
この2つの方法のパラメータ説明を見てみましょう. GetRobotList (オフセット,長さ,ロボットステータス,レーベル):
| パラメータ名 | タイプ | 意味 |
|---|---|---|
| オフセット | int | 検索したページコード |
| 長さ | int | 検索ページのデータ長 |
| ロボット 状態 | int | 送信1は全部取得する |
| ラベル | 文字列 | このタグのすべてのボットをフィルタリングできます. |
ロボット詳細を入手する
| パラメータ名 | タイプ | 意味 |
|---|---|---|
| ロボットId | int | ロボットID |
1 GetRobotList を使ってロボットリストを取得する
//获取机器人列表信息
var robotListJson = getAPIInfo('GetRobotList',getArgs(OFF_SET,PAGE_LENGTH,-1));
var robotList = robotListJson.data.result.robots;
2 ロボットの詳細を入手する
//获取机器人详情信息
var robotDetailJson = getAPIInfo('GetRobotDetail',getArgs(robotId));
var robotDetail = robotDetailJson.data.result.robot;
3 コントロールは表のデータを出力します
function getLogPrient(infoArr){
return table = {
type: 'table',
title: '奥克量化的机器人展示',
cols: ['机器人ID','机器人名称','策略名称','下次扣费时间','已经消耗时间ms','已经消耗金额CNY','最近活跃时间','是否公开'],
rows: infoArr
};
}
4 総括すると,次のコードがあります.
ソースアドレス:ワオーク量化
var URL = "https://www.fmz.com/api/v1?";
var AK = "b3a53d3XXXXXXXXXXXXXXXXXXX866fe5";//这里替换成你自己的AccessKey
var SK = "1d9ddd7XXXXXXXXXXXXXXXXXXX85be17";//这里替换成你自己的SecretKey
var OFF_SET = 0;//查询的页码下标
var PAGE_LENGTH = 5;//查询页的数据长度
function main() {
LogReset();
while(true){
//获取机器人列表信息
var robotListJson = getAPIInfo('GetRobotList',getArgs(OFF_SET,PAGE_LENGTH,-1));
//取出机器人列表信息
var robotList = robotListJson.data.result.robots;
//创建展示机器人信息的数组
var infoArr = new Array();
var infoArr_index = 0;
for (index = 0; index < robotList.length; index++) {
var robot = robotList[index];
//取出当前循环到的机器人ID
var robotId = robot.id;
//获取机器人详情信息
var robotDetailJson = getAPIInfo('GetRobotDetail',getArgs(robotId));
var robotDetail = robotDetailJson.data.result.robot;
//转换详情为数组对象
var arr = getLogPrientItem(robotDetail);
infoArr[infoArr_index] = arr;
infoArr_index++;
}
Log("infoArr:",infoArr);
LogStatus('`' + JSON.stringify(getLogPrient(infoArr)) + '`');
Sleep(30000);
}
}
function getLogPrient(infoArr){
return table = {
type: 'table',
title: '奥克量化的机器人展示',
cols: ['机器人ID','机器人名称','策略名称','下次扣费时间','已经消耗时间ms','已经消耗金额CNY','最近活跃时间','是否公开'],
rows: infoArr
};
}
//通过参数获取API信息
function getAPIInfo(method,dateInfo){
//获取5个基础参数对象
var param = getParam("1.0.0",AK,method,dateInfo);
//Log("param:",param);
//获取拼接参数md5加密后的结果
var md5Result = md5(param);
//赋值加密结果到基础参数对象中
param.sign = md5Result;
//获取请求api的URL
var finalUrl = getFinalUrl(param);
//Log("finalUrl:",finalUrl);
//执行请求并打印结果
var info = HttpQuery(finalUrl);
//Log("info:",info);
return JSON.parse(info);
}
//获取基础5个参数的对象
function getParam(version,ak,method,args){
return {
'version': version,
'access_key': ak,
'method': method,
'args': JSON.stringify(args),
'nonce': new Date().getTime()
}
}
//执行md5加密
function md5(param){
var paramUrl = param.version+"|"+param.method+"|"+param.args+"|"+param.nonce+"|"+SK
//Log("paramUrl:",paramUrl);
return Hash("md5", "hex", paramUrl)
}
//获取最终请求URL
function getFinalUrl(param){
return URL+"access_key="+AK+"&nonce="+param.nonce+"&args="+param.args+"&sign="+param.sign+"&version="+param.version+"&method="+param.method;
}
//js中不支持...args的命名方式,所以改用arguments关键字获取参数数组
function getArgs(){
return [].slice.call(arguments);
}
//获取展示详情对象'机器人ID','机器人名称','策略名称','下次扣费时间','已经消耗时间ms','已经消耗金额CNY','最近活跃时间','是否公开'],
function getLogPrientItem(robotDetail){
var itemArr = new Array();
var iteArr_index = 0;
itemArr[iteArr_index++] = robotDetail.id;
itemArr[iteArr_index++] = robotDetail.name;
itemArr[iteArr_index++] = robotDetail.strategy_name;
itemArr[iteArr_index++] = robotDetail.charge_time;
itemArr[iteArr_index++] = robotDetail.charged;
itemArr[iteArr_index++] = robotDetail.consumed/1e8;
itemArr[iteArr_index++] = robotDetail.refresh;
itemArr[iteArr_index++] = robotDetail.public == 0?"已公开":"未公开";
return itemArr;
}
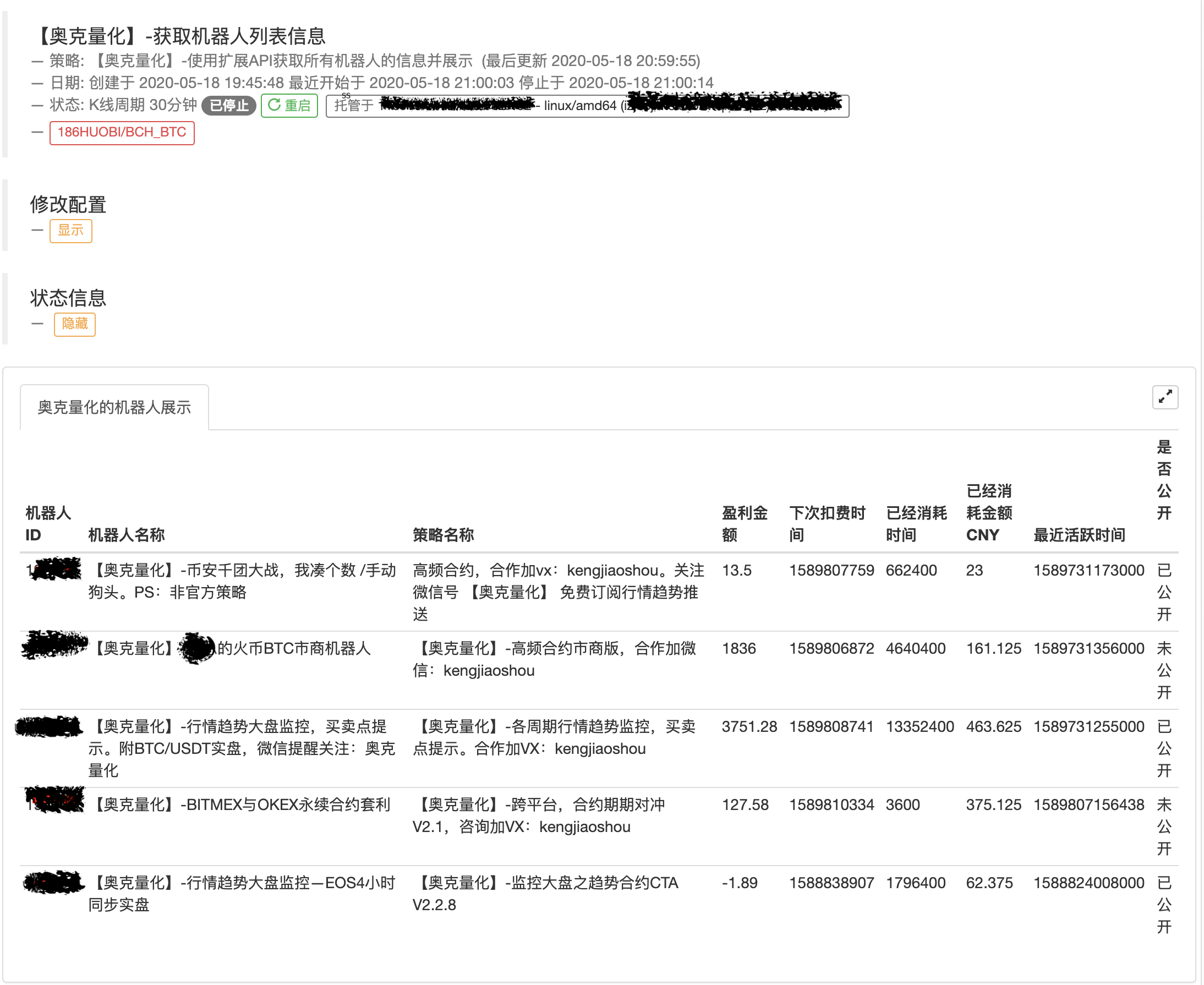
効果を表示する:
結論
実用的な拡張では,さらに多くの楽しい機能も実現できます.例えば,CommandRobotの方法を使って,各ロボットがAロボットに心拍数を送信し,Aロボットが特定の機械が心拍数がなく,しかしロボットがまだ動作していることを発見した場合,FMZサービス番号で警鐘を鳴らすことができます.このようにして,_C (_C) 死サイクルなどのプログラム死模擬シーンを引き起こす警報を回避できます. この機会に,FMZのプラットフォームは,もっと楽しく,もっと多くの機能が開発され,オープンソース化されていきたいと思います. 最後に,FMZのプラットフォームと,Dream Sum,Super Sum,Z大等皆さんのサポートと助けに感謝します.
- DEX取引所の量化実践 ((1)-- dYdX v4 ユーザーガイド
- デジタル通貨におけるリード-ラグ套路の紹介 (3)
- 暗号通貨におけるリード・ラグ・アービトラージへの導入 (2)
- デジタル通貨におけるリード-ラグ套路の紹介 (2)
- FMZプラットフォームの外部信号受信に関する議論: 戦略におけるHttpサービス内蔵の信号受信のための完全なソリューション
- FMZプラットフォームの外部信号受信に関する探求:戦略内蔵Httpサービス信号受信の完全な方案
- 暗号通貨におけるリード・ラグ・アービトラージへの導入 (1)
- デジタル通貨におけるリード-ラグ套路の紹介 (1)
- FMZプラットフォームの外部信号受信に関する議論:拡張API VS戦略内蔵HTTPサービス
- FMZプラットフォームの外部信号受信に関する探究:拡張API vs 戦略内蔵HTTPサービス
- ランダム・ティッカー・ジェネレーターに基づく戦略テスト方法に関する議論
- FMZシミュレーションレベルバックテストメカニズムの説明
- Linux VPS に FMZ ドッカー をインストールしてアップグレードする最良の方法
- コモディティ・フューチャーズR-ブレイカー戦略
- デジタル通貨の先物取引の論理について考える
- 市場 コート 収集器の実装を教えます
- Python バージョン コモディティ・フューチャーズ 移動平均戦略
- 市場 コート コレクター 再びアップグレード
- 行事収集器再アップグレード - CSV形式のファイル輸入をサポートし,カスタマイズされたデータソースを提供します
- C++ で書かれた高周波取引戦略
- ラリー・コナーズ RSI2 平均逆転戦略
- 日中戦略における新しい相対強度指数の使用に基づいて
- ビナンス・フューチャーズ・マルチ通貨ヘッジ戦略に関する研究 第4部分
- ラリー・コナーズ ラリー・コナーズ RSI2 平均回帰戦略
- ビナンス・フューチャーズ・マルチ通貨・ヘッジ戦略に関する研究 第3部
- ビナンス・フューチャーズ・マルチ通貨・ヘッジ戦略に関する研究 第2部
- バイナンス・フューチャーズ・マルチ通貨・ヘッジ戦略に関する研究 第1部
- 手がかりは,行事収集器にリクエストをアップグレードするために,カスタマイズされたデータソースの機能を教えます
- クロコディールライン取引システム Python版
- 発明者の量化取引プラットフォーム拡張APIを使用して,TradingViewのアラーム信号取引を実現する (推薦)
- JavaScript バージョン スーパートレンド 戦略
発明者1ショウカン
ほら ほら収集し,学びなさい