파이썬을 이용한 양적 거래 로봇을 구현하는 타이밍 시작 또는 중지 툴
저자:발명가들의 수량화 - 작은 꿈, 2020-02-14 21:56:58, 업데이트: 2023-10-10 21:13:38
파이썬을 이용한 양적 거래 로봇을 구현하는 타이밍 시작 또는 중지 툴
전인터넷 기능이 강력하고 유연하고 쉽게 사용할 수 있는 양자 거래 플랫폼으로, 발명가들의 양자 거래 플랫폼은 사용 한계가 매우 낮고 로봇 프로그램이 자원을 거의 차지하지는 않지만, 우리는 여전히 로봇이 실행할 때 시작해야 할 필요가 없으며 실행할 때 중단해야 할 필요가 없습니다. 예를 들어, 상품 선물 프로그램화, 양화 거래에서, 시장 개시 시간이 하루의 대부분을 차지한다. 그래서 우리는 로봇이 시장 개시 시간에만 운영되도록 매우 희망하고, 매일 시장 개시 시간에만 운영하도록 생각하면 비용이 많이 절감됩니다. 이 필요를 위해 우리는 FMZ 양화 거래 플랫폼에서 실행되는 전략 로봇을 파이썬 언어로 작성할 수 있습니다. 발명자는 거래 플랫폼의 확장 API 인터페이스를 정량화하여 로봇의 시작과 종료를 시간적으로 제어합니다.
이 모든 것은 우리가 할 수 있는 일입니다.
실제로 전체 코드는 매우 간단합니다. 개발자 양적 거래 플랫폼 확장 API의 예를 직접 사용할 수 있습니다.
주소:https://www.fmz.com/api#简单的例子
예를 들어서 직접 사용하는 함수:def api(method, *args)우리가 호출해야 할 인터페이스는 다음과 같은 두 개의 인터페이스를 사용하여 매우 간단합니다. (FMZ 문서에서 검색 할 수 있습니다.)
-
다시 시작Robot 로봇 인터페이스를 다시 시작하면 로봇 ID에 파라미터가 전달됩니다. 특정 사용
id이 글은 이쪽에서 작성되었습니다.api('RestartRobot', id) -
스톱로봇 로봇 인터페이스를 중지, 파라미터도 로봇
ID。로봇
ID이 글은 한글로 번역되어 있습니다.
발명가 양자 거래 플랫폼을 호출 API 확장API KEYᅳ
계정 관리에서 직접 생성할 수 있습니다.API KEYᅳ
우리는API KEY정책의 매개 변수로 전달됩니다.
발명가 계정 수량화 거래소API KEY사진: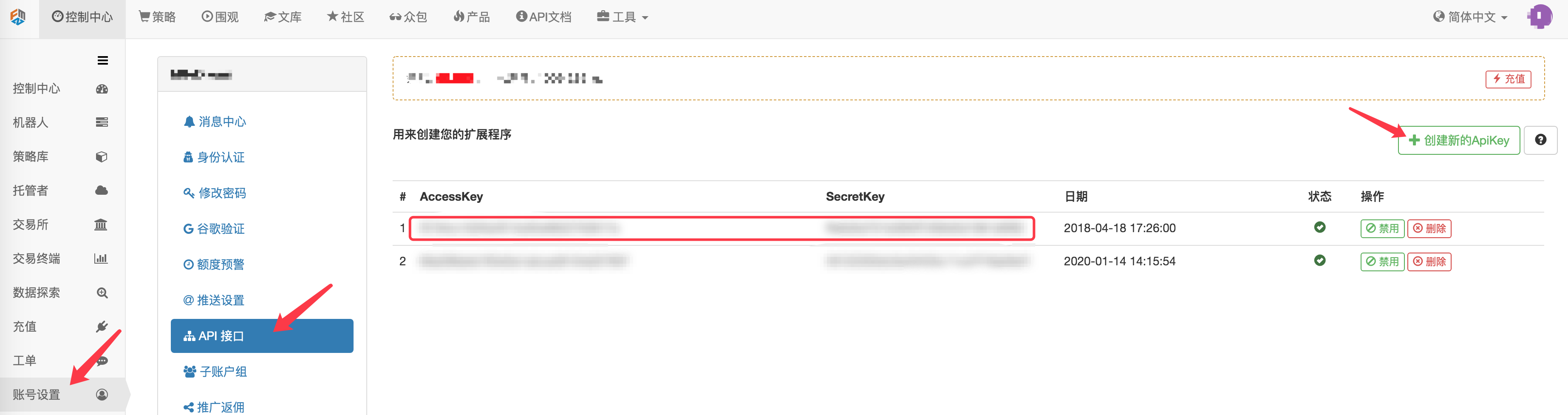
이제 남은 것은 타이밍 논리를 작성하는 것인데, 매우 간단합니다.
["175708,14:55:33-15:10:33", ...]
우회표는 더 많은 비슷한 것을 설정할 수 있습니다."175708,14:55:33-15:10:33"이 글의 내용은
시간변수는 JSON 문자열이며, 정책 코드는 이를 분석하여 목록으로 분석한다. 목록의 각 요소는 로봇의 시작/종종 설정이다.
그 이유는:
"175708,14:55:33-15:10:33"
이 부분에는 코마스 간격으로 ▲ 코마스 앞부분이 있습니다.175708로봇 ID의 경우, 코마 뒤에 있는 부분은 시작 시간/정지 시간이다.
예를 들어, ID는: 175708 로봇, 14:55:33 시작, 15:10:33 중지.
그 다음 전략에서 끊임없이 회전하여, 회전마다 현재 시간을 얻으며, 현재 시간과 시점 시간을 비교하여 로봇을 시작하거나 중지하는 것을 결정합니다. 만약 트리거되면, api (RestartRobot id) 또는 api (StopRobot id) 를 호출하여 로봇을 시작하거나 중지합니다.
전 전략 코드:
# -*- coding: utf-8 -*-
import time
import json
try:
import md5
import urllib2
from urllib import urlencode
except:
import hashlib as md5
import urllib.request as urllib2
from urllib.parse import urlencode
def api(method, *args):
d = {
'version': '1.0',
'access_key': accessKey,
'method': method,
'args': json.dumps(list(args)),
'nonce': int(time.time() * 1000),
}
d['sign'] = md5.md5(('%s|%s|%s|%d|%s' % (d['version'], d['method'], d['args'], d['nonce'], secretKey)).encode('utf-8')).hexdigest()
return json.loads(urllib2.urlopen('https://www.fmz.com/api/v1', urlencode(d).encode('utf-8')).read().decode('utf-8'))
RobotParams = json.loads(strRobotParams)
def main():
global RobotParams
arrParams = []
nowDay = 0
strPush = ""
if isPushMsg:
strPush = "@"
for i in range(len(RobotParams)):
param = {}
arr = RobotParams[i].split(",")
if len(arr) != 2:
raise Exception("字符串配置错误:分隔符号,")
param["id"] = arr[0]
param["isProcessOpenThisDay"] = False
param["isProcessCloseThisDay"] = False
arr = arr[1].split("-")
if len(arr) != 2:
raise Exception("字符串配置错误:分隔符号-")
begin = arr[0]
arrBegin = begin.split(":")
if len(arrBegin) != 3:
raise Exception("字符串配置错误:起始时间分隔符号:")
param["begin"] = {}
param["begin"]["hour"] = float(arrBegin[0])
param["begin"]["min"] = float(arrBegin[1])
param["begin"]["sec"] = float(arrBegin[2])
end = arr[1]
arrEnd = end.split(":")
if len(arrEnd) != 3:
raise Exception("字符串配置错误:结束时间分隔符号:")
param["end"] = {}
param["end"]["hour"] = float(arrEnd[0])
param["end"]["min"] = float(arrEnd[1])
param["end"]["sec"] = float(arrEnd[2])
arrParams.append(param)
# 测试
Log("输出参数", arrParams, "#FF0000")
while True:
nowTime = time.localtime(time.time())
nowHour = nowTime.tm_hour
nowMin = nowTime.tm_min
nowSec = nowTime.tm_sec
tbl = {
"type" : "table",
"title" : "msg",
"cols" : ["id", "begin", "end", "今天是否执行过启动", "今天是否执行过停止"],
"rows" : []
}
for i in range(len(arrParams)):
tbl["rows"].append([arrParams[i]["id"], json.dumps(arrParams[i]["begin"]), json.dumps(arrParams[i]["end"]), arrParams[i]["isProcessOpenThisDay"], arrParams[i]["isProcessCloseThisDay"]])
if nowDay != nowTime.tm_mday:
arrParams[i]["isProcessOpenThisDay"] = False
arrParams[i]["isProcessCloseThisDay"] = False
if arrParams[i]["isProcessOpenThisDay"] == False:
if nowTime.tm_hour == arrParams[i]["begin"]["hour"] and nowTime.tm_min >= arrParams[i]["begin"]["min"] and nowTime.tm_sec >= arrParams[i]["begin"]["sec"]:
ret = api('RestartRobot', int(arrParams[i]["id"]))
arrParams[i]["isProcessOpenThisDay"] = True
Log("机器人ID:", arrParams[i]["id"], "执行启动,请登录平台检查是否启动成功", "扩展API返回值:", ret, strPush)
if arrParams[i]["isProcessCloseThisDay"] == False:
if nowTime.tm_hour == arrParams[i]["end"]["hour"] and nowTime.tm_min >= arrParams[i]["end"]["min"] and nowTime.tm_sec >= arrParams[i]["end"]["sec"]:
ret = api('StopRobot', int(arrParams[i]["id"]))
arrParams[i]["isProcessCloseThisDay"] = True
Log("机器人ID:", arrParams[i]["id"], "执行停止,请登录平台检查是否停止成功", "扩展API返回值:", ret, strPush)
if nowDay != nowTime.tm_mday:
nowDay = nowTime.tm_mday
LogStatus(_D(), nowTime, "\n`" + json.dumps(tbl) + "`")
Sleep(500)
로보트 설정:
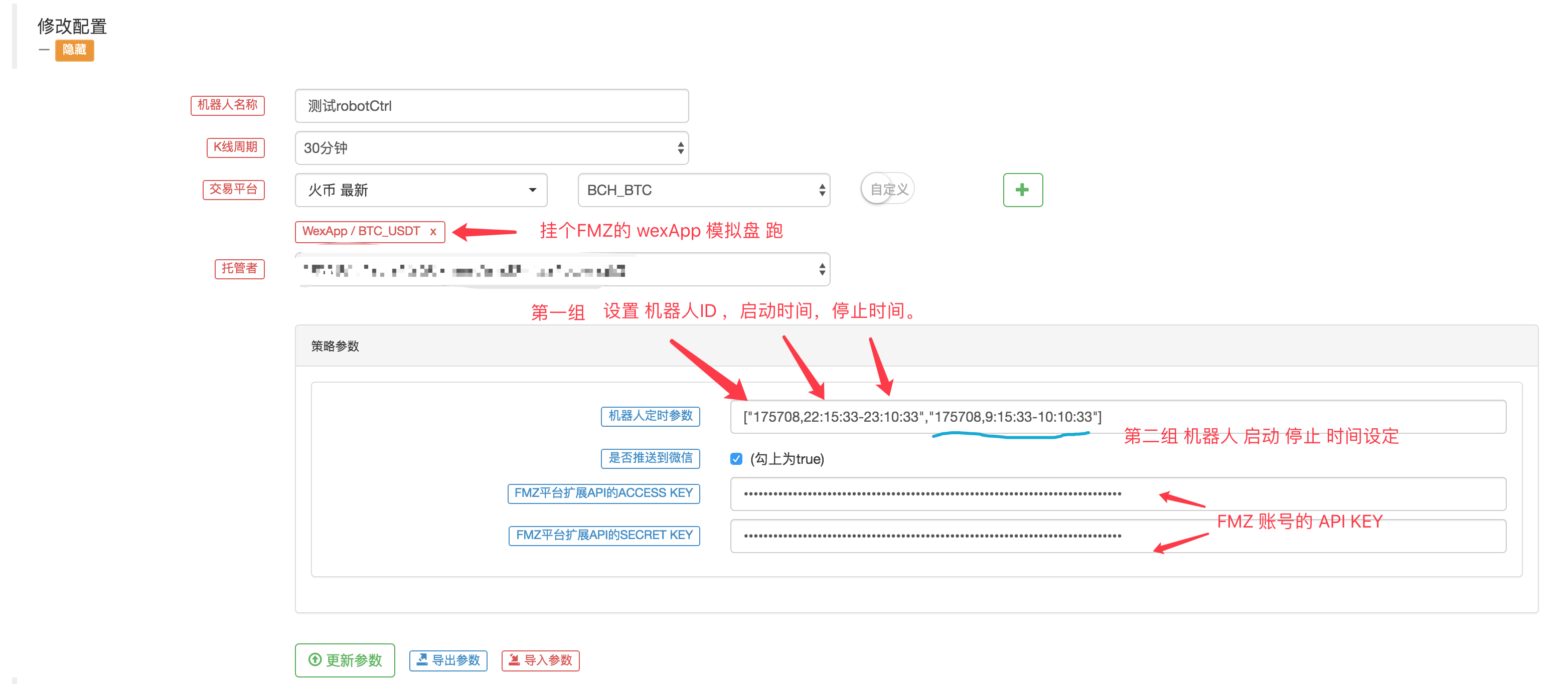
전략 실행:
초상화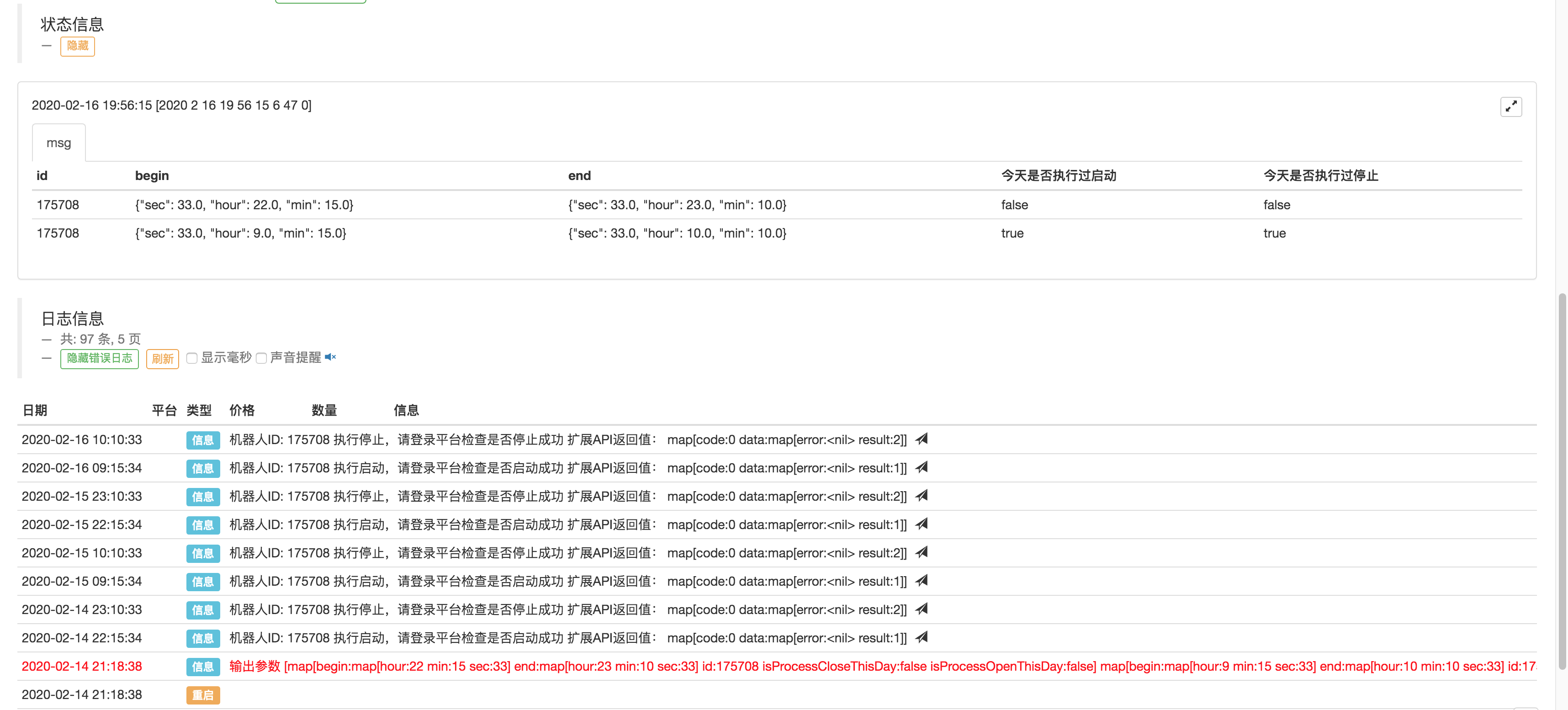
이 전략에 의해 조작된 로봇은:
끝
또한, 개발자의 양적 거래 플랫폼의 확장 API는 매우 강력하며 FMZ 플랫폼을 기반으로 한 자체 양적 거래 플랫폼으로 확장 API를 사용하는 것은 전혀 문제가 없습니다. 이 타이밍 로봇의 설계는 비교적 간단하며, 단지 시간이 시작될 때까지 머리가 없고, 시간이 멈출 때까지, 시작 성공 여부를 포함하지 않고, 검사, 비정상 재시험, 등등의 메커니즘을 포함하지 않고, 기능이 추가될 수 있고 확장될 수 있는 흥미가 있다. 전략은 학습용입니다.
- 암호화폐의 리드-래그 중재에 대한 소개 (2)
- 디지털 화폐의 리드-래그 스위트 소개 (2)
- FMZ 플랫폼의 외부 신호 수신에 대한 논의: 전략 내 내장 Http 서비스와 함께 신호 수신에 대한 완전한 솔루션
- FMZ 플랫폼 외부 신호 수신에 대한 탐구: 전략 내장 HTTP 서비스 신호 수신의 전체 방안
- 암호화폐의 리드-래그 중재에 대한 소개 (1)
- 디지털 화폐의 리드-래그 스위트 소개 (1)
- FMZ 플랫폼의 외부 신호 수신에 대한 논의: 확장 API VS 전략 내장 HTTP 서비스
- FMZ 플랫폼 외부 신호 수신에 대한 탐구: 확장 API vs 전략 내장 HTTP 서비스
- 무작위 틱커 생성기에 기반한 전략 테스트 방법 논의
- 무작위 시장 생성기에 기반한 전략 테스트 방법을 탐구합니다.
- FMZ Quant의 새로운 기능: _Serve 기능을 사용하여 HTTP 서비스를 쉽게 만들 수 있습니다
- 손잡이, 손잡이, 손잡이
- [천군대전] 코인안 퓨처스 공허한 오버
오버락 전략 위험 분석 (제3부) - [천군대전] 코인안 퓨처스 공허한 초상승과 초하락 전략의 중요한 최적화 (제2부)
- [천국 전쟁] 코인안 외환 다화폐 헤지 전략 연구 (제1부)
- 98년 학부생의 동전과 정량화 경로
- 파이썬 버전의 아이스만 위탁 전략
- 디지털 화폐 기반의 동적 균형 전략
- 트레이딩 터미널 플러그인을 사용하여 수동 거래를 편리하게 합니다.
- 파이썬 버전 MACD 그래프 예제
- 브린밴드 기반의 디지털 화폐 중장기 배당 전략
의 여동생이 제1차 총회에 속삭인다 - 양적 분산율 거래 전략
- 파이썬 게시판 평형 전략
- 노인 농부들의 발걸음
- 95년 이후의 동전자
- 한 가지 종류의 전략에서 여러 가지 종류의 전략으로 전환하는 방법을 알려줍니다.
- 제 자동화 손실과 FMZ 출륙 여행
- FMZ 심장 경로 - 도약 전략과 함께
- 파이썬 버전을 추격하고 떨어지는 전략
- 파이썬 버전의 간단한 격자 전략