ہل چلتی اوسط اور کلمان فلٹر پر مبنی رجحان ٹریکنگ کی حکمت عملی
مصنف:چاؤ ژانگ، تاریخ: 2023-11-01 17:10:49ٹیگز:
جائزہ
یہ حکمت عملی ہل موونگ ایوریج اور کیل مین فلٹر کو یکجا کرتی ہے تاکہ قیمت کے رجحانات کی نشاندہی اور ان کا سراغ لگایا جاسکے۔ یہ تجارتی سگنل پیدا کرنے کے لئے مختلف ادوار کے ساتھ دو ہل موونگ ایوریجز کا استعمال کرتی ہے ، اور سگنل کو ہموار کرنے کے لئے کیل مین فلٹر کو اپناتی ہے ، جس کا مقصد سگنل کے معیار اور حکمت عملی کے استحکام کو بہتر بنانا ہے۔
حکمت عملی منطق
-
یہ حکمت عملی تجارتی سگنل بنانے کے لیے 24 پیریڈ ہل موونگ ایوریج (ایچ ایم اے) اور 24 پیریڈ ٹرپل ہل موونگ ایوریج (ایچ ایم اے 3) کا استعمال کرتی ہے۔
-
جب ہما ہما3 سے تجاوز کرتا ہے، تو خریدنے کا سگنل پیدا ہوتا ہے۔ جب ہما ہما3 سے تجاوز کرتا ہے، تو فروخت کا سگنل پیدا ہوتا ہے۔
-
Kalman فلٹر ڈیفالٹ طور پر غیر فعال ہے۔ جب فعال ہوتا ہے تو ، یہ زیادہ شور کو فلٹر کرنے اور سگنل کے معیار کو بہتر بنانے کے لئے hma اور hma3 کو ہموار کرتا ہے۔
-
کالمین فلٹر پیشن گوئی اور اصلاح کے اقدامات کے ذریعے سگنلز سے بے ترتیب شور کو ختم کرتا ہے۔ ہر پیمائش اور آخری پیشن گوئی کے درمیان فرق کو درست کرنے والے آئٹم کے طور پر سمجھا جاتا ہے تاکہ اگلی پیمائش کو زیادہ درست طریقے سے پیش گوئی کی جاسکے۔ پیشن گوئی اور اصلاح کو دہرانے سے ، شور کے اثرات کو آہستہ آہستہ کم کیا جاسکتا ہے تاکہ سگنل کو ہموار کیا جاسکے۔
-
اس حکمت عملی کا فائدہ اٹھانے کے Kalman فلٹر کی طرف سے فلٹر کرنے کی طرف سے چلتی اوسط کی حکمت عملی کے استحکام کو بڑھانے کے لئے بے ترتیب اتار چڑھاؤ اور مسلسل رجحانات کو ٹریک.
فوائد
-
دوہری چلتی اوسط نظام ایک واحد چلتی اوسط کے مقابلے میں بہتر دیرپا رجحانات کی شناخت کر سکتے ہیں.
-
ہل چلتی اوسط وزن حساب کے ذریعے حالیہ قیمتوں پر زیادہ وزن ڈالتا ہے، قیمتوں میں تبدیلیوں کو پکڑنے میں اسے زیادہ حساس بناتا ہے.
-
کالمین فلٹر سگنل سے بے ترتیب شور کو مؤثر طریقے سے فلٹر کرسکتا ہے ، غلط سگنل کو کم کرتا ہے اور سگنل کے معیار کو بہتر بناتا ہے۔
-
ایڈجسٹ پیرامیٹرز جیسے دورانیہ اور کالمان فلٹر فائدہ حکمت عملی کو مختلف مارکیٹ کے حالات کو اپنانے کی اجازت دیتا ہے.
-
کراس پیریڈ کی تکنیکوں کو اپنانے سے زیادہ مستقل سگنل پیدا ہوتے ہیں، زیادہ بے ترتیب اتار چڑھاؤ کی طرف سے گمراہ ہونے سے بچنے کے لئے.
-
بصری انٹرفیس آسانی سے آپریشن کے لئے سگنل اور رجحان کی حیثیت کو بدیہی طور پر ظاہر کرتا ہے۔
خطرات
-
دوہری حرکت پذیر اوسط ٹرینڈ ٹرننگ پوائنٹس کے ارد گرد غلط سگنل پیدا کرنے کے لئے موزوں ہیں، بروقت واپسیوں کو پکڑنے کے قابل نہیں ہیں.
-
چلتی اوسط کی پسماندگی تیزی سے قیمتوں میں تبدیلی کے مواقع کو کھو سکتی ہے۔
-
شدید اتار چڑھاؤ والی منڈیوں کے لیے موزوں نہیں ہے۔ اسے ہنگامہ خیز مراحل کے دوران استعمال کرنے سے گریز کرنا چاہیے۔
-
Kalman فلٹر پیرامیٹرز حکمت عملی کی کارکردگی کو متاثر کر سکتے ہیں. بہت بڑا فائدہ درست سگنل فلٹر کر سکتے ہیں.
-
لمبے عرصے میں آہستہ ردعمل ہوتا ہے جبکہ مختصر عرصے میں شور کا خطرہ ہوتا ہے۔ مارکیٹ کے حالات کی بنیاد پر پیرامیٹر ٹوننگ کی ضرورت ہوتی ہے۔
-
غیر فکسڈ طویل / مختصر ہولڈنگ کی مدت غیر فعال وقت کی وجہ سے کوئی پوزیشن نہیں ہے، جس میں سرمایہ کاری کے استعمال کی کارکردگی کو کم کرنا.
بہتری
-
انکولی چلتی اوسط کی کوشش کریں جو اتار چڑھاؤ کی بنیاد پر پیرامیٹرز کو متحرک طور پر بہتر بناتے ہیں۔
-
اتار چڑھاؤ کی پیمائش کو شامل کریں تاکہ مارکیٹوں کے دوران تجارت سے بچنے اور صرف واضح رجحانات پر تجارت کریں.
-
نقصانات کو محدود کرنے اور خطرے کے کنٹرول کو بہتر بنانے کے لئے سٹاپ نقصان قائم کریں.
-
ٹریکنگ حساسیت اور شور فلٹرنگ کی سطح کو متوازن کرنے کے لئے Kalman فلٹر پیرامیٹرز کو بہتر بنائیں.
-
سگنل کی صداقت کو حجم، بولنگر بینڈ جیسے دیگر اشارے کے ساتھ تصدیق کریں تاکہ رجحان برقرار رہ سکے۔
-
پیرامیٹرز کو تربیت دینے اور حکمت عملی کی مضبوطی اور موافقت کو بہتر بنانے کے لئے مشین لرننگ کا استعمال کریں۔
نتیجہ
یہ حکمت عملی دوہری ہل ایم اے اور کیل مین فلٹر کے ذریعہ پائیدار رجحانات کی مؤثر طریقے سے نشاندہی کرتی ہے اور سگنل کے معیار کو بہتر بناتی ہے۔ مستحکم منافع کے ل param پیرامیٹر کی اصلاح ، مارکیٹ کی موافقت اور رسک کنٹرول کو نوٹ کریں۔ مشین لرننگ اور مقداری تجزیہ کے ذریعے مزید بہتری حاصل کی جاسکتی ہے۔ مسلسل بہتری سے ایک مضبوط اور موثر رجحان ٹریکنگ سسٹم تشکیل پائے گا۔
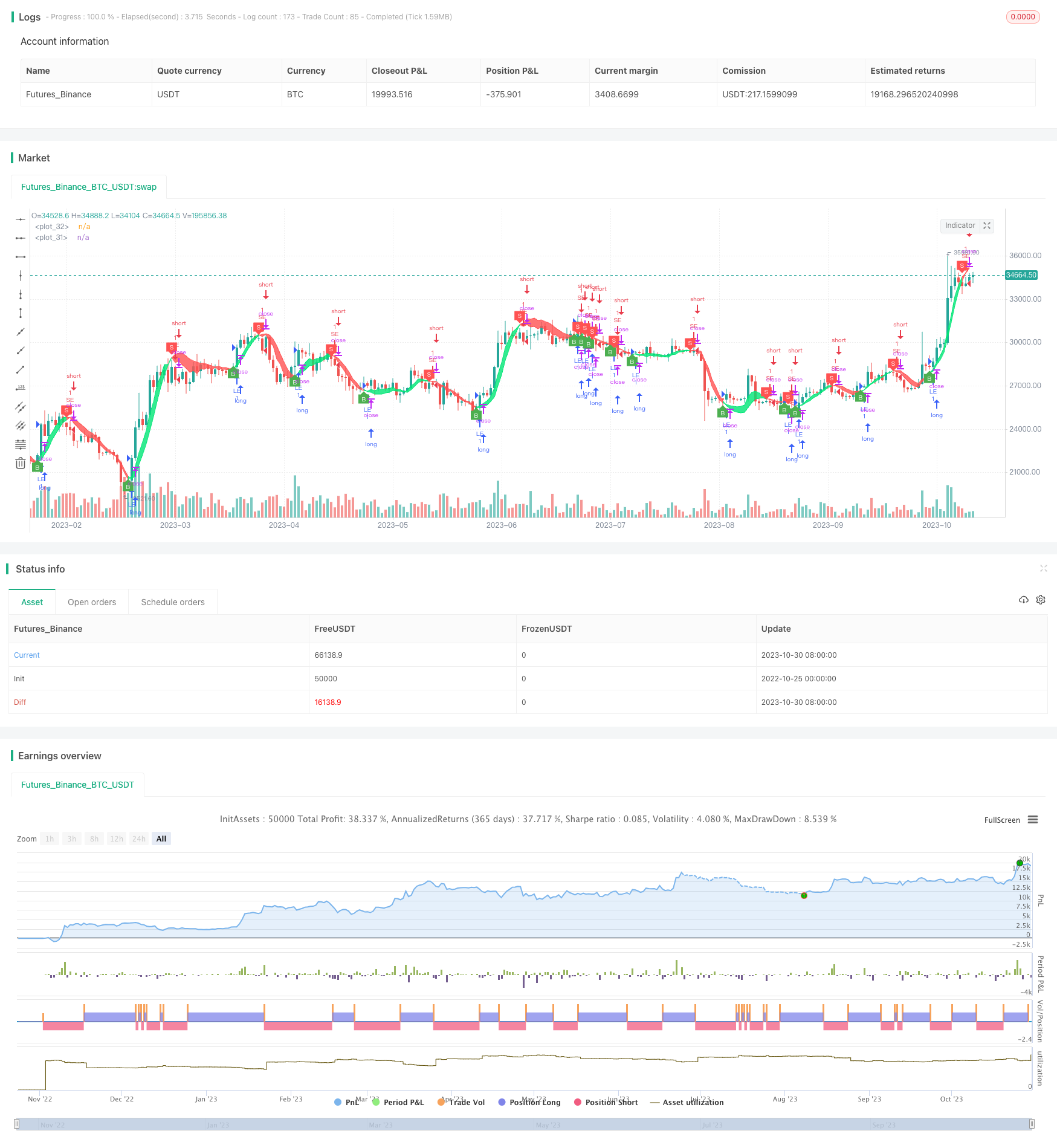
/*backtest
start: 2022-10-25 00:00:00
end: 2023-10-31 00:00:00
period: 1d
basePeriod: 1h
exchanges: [{"eid":"Futures_Binance","currency":"BTC_USDT"}]
*/
//@version=4
strategy("Hull Trend with Kahlman Strategy Backtest", shorttitle="HMA-Kahlman Trend Strat", overlay=true)
src = input(hl2, "Price Data")
length = input(24, "Lookback")
showcross = input(true, "Show cross over/under")
gain = input(10000, "Gain")
k = input(true, "Use Kahlman")
hma(_src, _length) =>
wma((2 * wma(_src, _length / 2)) - wma(_src, _length), round(sqrt(_length)))
hma3(_src, _length) =>
p = length/2
wma(wma(close,p/3)*3 - wma(close,p/2) - wma(close,p),p)
kahlman(x, g) =>
kf = 0.0
dk = x - nz(kf[1], x)
smooth = nz(kf[1],x)+dk*sqrt((g/10000)*2)
velo = 0.0
velo := nz(velo[1],0) + ((g/10000)*dk)
kf := smooth+velo
a = k ? kahlman(hma(src, length), gain) : hma(src, length)
b = k ? kahlman(hma3(src, length), gain) : hma3(src, length)
c = b > a ? color.lime : color.red
crossdn = a > b and a[1] < b[1]
crossup = b > a and b[1] < a[1]
p1 = plot(a,color=c,linewidth=1,transp=75)
p2 = plot(b,color=c,linewidth=1,transp=75)
fill(p1,p2,color=c,transp=55)
plotshape(showcross and crossdn ? a : na, location=location.absolute, style=shape.labeldown, color=color.red, size=size.tiny, text="S", textcolor=color.white, transp=0, offset=-1)
plotshape(showcross and crossup ? a : na, location=location.absolute, style=shape.labelup, color=color.green, size=size.tiny, text="B", textcolor=color.white, transp=0, offset=-1)
longCondition = crossup
if (longCondition)
strategy.entry("LE", strategy.long)
shortCondition = crossdn
if (shortCondition)
strategy.entry("SE", strategy.short)
- رجحان لائن ٹریڈنگ کی حکمت عملی
- اسٹوکاسٹک آر ایس آئی اور حجم پر مبنی تجارتی حکمت عملی
- کوانٹم ٹریڈنگ میں ٹریڈنگ انفیکشن پوائنٹس کی نشاندہی کرنے کے لئے کثیر اشارے کی حکمت عملی
- اے ٹی آر ٹریلنگ اسٹاپ حکمت عملی (صرف لمبی)
- رجحان ٹریکنگ سٹاپ نقصان پر مبنی رفتار ٹریڈنگ کی حکمت عملی
- دوہری دباؤ کی مقداری تجارتی حکمت عملی
- ایپل کی کمپنی ویک ٹونگ نے روبوٹ گروپ کو پیغامات بھیجنے کی اجازت دے دی
- بریکآؤٹ ٹرینڈ فالور V2
- چلتی اوسط کراس اوور حکمت عملی کے بعد رجحان
- رفتار توڑنے والی اوسط ٹریڈنگ کی حکمت عملی
- گولڈن کراس رجحان حکمت عملی کے بعد
- ڈبل اوسیلیشن الٹ سگنل شور تناسب کی اصلاح کمبو حکمت عملی
- کلاسیکی ڈبل ٹرینڈ ٹریکنگ حکمت عملی
- دوہری ریورس ٹریڈنگ کی حکمت عملی
- بولنگر بینڈس اوسیلیشن بریکنگ اسٹریٹیجی
- فبونیکی حرکت پذیر اوسط ان پٹ حکمت عملی
- ایم اے سی ڈی ڈسپریشن اور ملٹی ٹائم فریم چلتی اوسط حکمت عملی
- دولت پیدا کرنے کی جامع حکمت عملی
- ڈالر لاگت اوسط سرمایہ کاری کی حکمت عملی
- سی سی آئی میڈین ریورس چینل کی حکمت عملی