Tendência do Canal Gaussiano Seguindo a Estratégia
Autora:ChaoZhang, Data: 2024-03-29Tags:
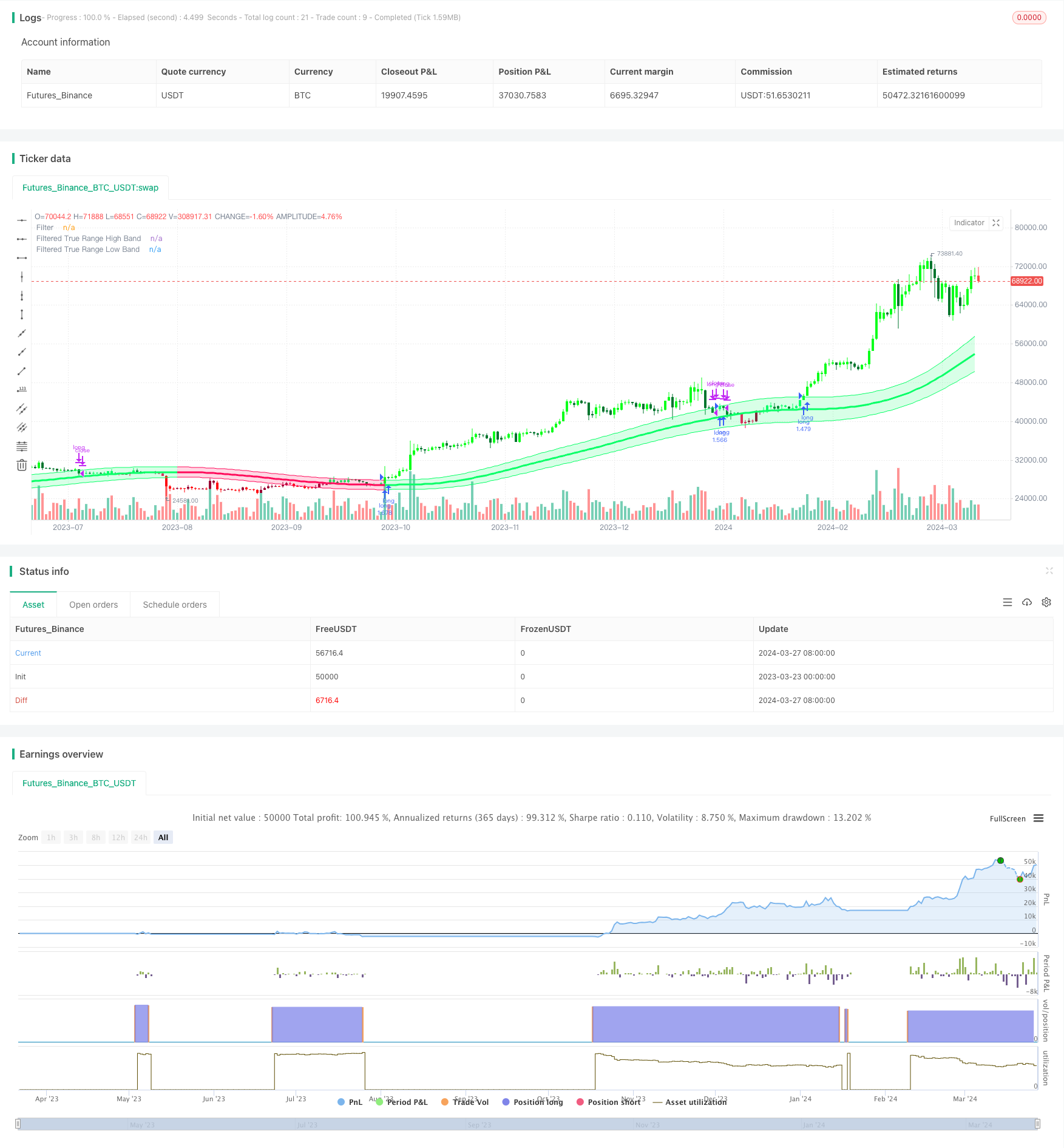
Resumo
A estratégia de acompanhamento de tendência do canal de Gauss é uma estratégia de negociação baseada no indicador do canal de Gauss. A estratégia visa capturar as principais tendências do mercado, comprando e mantendo posições durante tendências de alta e fechando posições durante tendências de baixa.
Princípio da estratégia
O núcleo da estratégia de seguimento de tendências do canal de Gauss é o indicador de canal de Gauss, que foi proposto por Ehlers. Ele combina técnicas de filtragem de Gauss com True Range para analisar a atividade da tendência. O indicador primeiro calcula os valores beta e alfa com base no período de amostragem e no número de pólos, depois aplica um filtro aos dados para obter uma curva suavizada (linha média). Em seguida, a estratégia multiplica a True Range suavizada por um multiplicador para gerar os canais superior e inferior. Quando o preço atravessa acima / abaixo do canal superior / inferior, ele gera um sinal de compra / venda. Além disso, a estratégia oferece recursos para reduzir o atraso do indicador e um modo de resposta rápido.
Vantagens da estratégia
- Seguimento de tendências: A estratégia se destaca por capturar as principais tendências do mercado, investindo na direção da tendência, o que ajuda a alcançar retornos estáveis a longo prazo.
- Frequência de negociação reduzida: a estratégia só entra em posições quando uma tendência é confirmada e mantém posições durante a tendência, reduzindo assim custos de negociação e transação desnecessários.
- Redução do atraso: através do modo de atraso reduzido e do modo de resposta rápida, a estratégia pode reagir mais rapidamente às mudanças do mercado.
- Parâmetros flexíveis: Os utilizadores podem ajustar os parâmetros da estratégia de acordo com as suas necessidades, tais como período de amostragem, número de postes, multiplicador de True Range, etc., para otimizar o desempenho da estratégia.
Riscos estratégicos
- Risco de otimização de parâmetros: configurações incorretas de parâmetros podem levar a um mau desempenho da estratégia. Recomenda-se realizar otimização de parâmetros e backtesting em diferentes ambientes de mercado para encontrar a combinação ideal de parâmetros.
- Risco de reversão de tendência: quando as tendências do mercado se revertem repentinamente, a estratégia pode sofrer reduções significativas.
- Risco de mercado limitado: em mercados limitados ao intervalo, a estratégia pode gerar sinais de negociação frequentes, levando a retornos diminuídos.
Orientações para a otimização da estratégia
- Incorporar Outros Indicadores Técnicos: Combinar com outros indicadores de tendência ou osciladores, como MACD, RSI, etc., para melhorar a precisão e a confiabilidade do sinal.
- Optimização de parâmetros dinâmicos: ajustar dinamicamente os parâmetros da estratégia com base nas mudanças nas condições de mercado para se adaptar a diferentes ambientes de mercado.
- Adicionar módulo de controlo de risco: definir regras razoáveis de stop-loss e take-profit para controlar o risco comercial individual e os níveis globais de retirada.
- Análise de vários prazos: Combinar sinais de diferentes prazos, como gráficos diários e de 4 horas, para obter informações de mercado mais abrangentes.
Resumo
A estratégia de seguimento de tendências do canal de Gauss é uma estratégia de negociação baseada em técnicas de filtragem de Gauss, que visa capturar as principais tendências do mercado para retornos estáveis de longo prazo. A estratégia usa o indicador do canal de Gauss para identificar a direção e a força da tendência, oferecendo recursos para reduzir o atraso e fornecer uma resposta rápida. As vantagens da estratégia estão em sua forte capacidade de seguir tendências e baixa frequência de negociação. No entanto, também enfrenta riscos como otimização de parâmetros, inversões de tendência e mercados de faixa.
/*backtest
start: 2023-03-23 00:00:00
end: 2024-03-28 00:00:00
period: 1d
basePeriod: 1h
exchanges: [{"eid":"Futures_Binance","currency":"BTC_USDT"}]
*/
//@version=5
strategy(title="Gaussian Channel Strategy v2.0", overlay=true, calc_on_every_tick=false, initial_capital=1000, default_qty_type=strategy.percent_of_equity, default_qty_value=100, commission_type=strategy.commission.percent, commission_value=0.1, slippage=3)
//-----------------------------------------------------------------------------------------------------------------------------------------------------------------
// Gaussian Channel Indicaor - courtesy of @DonovanWall
//-----------------------------------------------------------------------------------------------------------------------------------------------------------------
// Date condition inputs
startDate = input(timestamp("1 January 2018 00:00 +0000"), "Date Start", group="Main Algo Settings")
endDate = input(timestamp("1 January 2060 00:00 +0000"), "Date Start", group="Main Algo Settings")
timeCondition = true
// This study is an experiment utilizing the Ehlers Gaussian Filter technique combined with lag reduction techniques and true range to analyze trend activity.
// Gaussian filters, as Ehlers explains it, are simply exponential moving averages applied multiple times.
// First, beta and alpha are calculated based on the sampling period and number of poles specified. The maximum number of poles available in this script is 9.
// Next, the data being analyzed is given a truncation option for reduced lag, which can be enabled with "Reduced Lag Mode".
// Then the alpha and source values are used to calculate the filter and filtered true range of the dataset.
// Filtered true range with a specified multiplier is then added to and subtracted from the filter, generating a channel.
// Lastly, a one pole filter with a N pole alpha is averaged with the filter to generate a faster filter, which can be enabled with "Fast Response Mode".
// Custom bar colors are included.
// Note: Both the sampling period and number of poles directly affect how much lag the indicator has, and how smooth the output is.
// Larger inputs will result in smoother outputs with increased lag, and smaller inputs will have noisier outputs with reduced lag.
// For the best results, I recommend not setting the sampling period any lower than the number of poles + 1. Going lower truncates the equation.
//-----------------------------------------------------------------------------------------------------------------------------------------------------------------
// Updates:
// Huge shoutout to @e2e4mfck for taking the time to improve the calculation method!
// -> migrated to v4
// -> pi is now calculated using trig identities rather than being explicitly defined.
// -> The filter calculations are now organized into functions rather than being individually defined.
// -> Revamped color scheme.
//-----------------------------------------------------------------------------------------------------------------------------------------------------------------
// Functions - courtesy of @e2e4mfck
//-----------------------------------------------------------------------------------------------------------------------------------------------------------------
// Filter function
f_filt9x (_a, _s, _i) =>
int _m2 = 0, int _m3 = 0, int _m4 = 0, int _m5 = 0, int _m6 = 0,
int _m7 = 0, int _m8 = 0, int _m9 = 0, float _f = .0, _x = (1 - _a)
// Weights.
// Initial weight _m1 is a pole number and equal to _i
_m2 := _i == 9 ? 36 : _i == 8 ? 28 : _i == 7 ? 21 : _i == 6 ? 15 : _i == 5 ? 10 : _i == 4 ? 6 : _i == 3 ? 3 : _i == 2 ? 1 : 0
_m3 := _i == 9 ? 84 : _i == 8 ? 56 : _i == 7 ? 35 : _i == 6 ? 20 : _i == 5 ? 10 : _i == 4 ? 4 : _i == 3 ? 1 : 0
_m4 := _i == 9 ? 126 : _i == 8 ? 70 : _i == 7 ? 35 : _i == 6 ? 15 : _i == 5 ? 5 : _i == 4 ? 1 : 0
_m5 := _i == 9 ? 126 : _i == 8 ? 56 : _i == 7 ? 21 : _i == 6 ? 6 : _i == 5 ? 1 : 0
_m6 := _i == 9 ? 84 : _i == 8 ? 28 : _i == 7 ? 7 : _i == 6 ? 1 : 0
_m7 := _i == 9 ? 36 : _i == 8 ? 8 : _i == 7 ? 1 : 0
_m8 := _i == 9 ? 9 : _i == 8 ? 1 : 0
_m9 := _i == 9 ? 1 : 0
// filter
_f := math.pow(_a, _i) * nz(_s) +
_i * _x * nz(_f[1]) - (_i >= 2 ?
_m2 * math.pow(_x, 2) * nz(_f[2]) : 0) + (_i >= 3 ?
_m3 * math.pow(_x, 3) * nz(_f[3]) : 0) - (_i >= 4 ?
_m4 * math.pow(_x, 4) * nz(_f[4]) : 0) + (_i >= 5 ?
_m5 * math.pow(_x, 5) * nz(_f[5]) : 0) - (_i >= 6 ?
_m6 * math.pow(_x, 6) * nz(_f[6]) : 0) + (_i >= 7 ?
_m7 * math.pow(_x, 7) * nz(_f[7]) : 0) - (_i >= 8 ?
_m8 * math.pow(_x, 8) * nz(_f[8]) : 0) + (_i == 9 ?
_m9 * math.pow(_x, 9) * nz(_f[9]) : 0)
// 9 var declaration fun
f_pole (_a, _s, _i) =>
_f1 = f_filt9x(_a, _s, 1), _f2 = (_i >= 2 ? f_filt9x(_a, _s, 2) : 0), _f3 = (_i >= 3 ? f_filt9x(_a, _s, 3) : 0)
_f4 = (_i >= 4 ? f_filt9x(_a, _s, 4) : 0), _f5 = (_i >= 5 ? f_filt9x(_a, _s, 5) : 0), _f6 = (_i >= 6 ? f_filt9x(_a, _s, 6) : 0)
_f7 = (_i >= 2 ? f_filt9x(_a, _s, 7) : 0), _f8 = (_i >= 8 ? f_filt9x(_a, _s, 8) : 0), _f9 = (_i == 9 ? f_filt9x(_a, _s, 9) : 0)
_fn = _i == 1 ? _f1 : _i == 2 ? _f2 : _i == 3 ? _f3 :
_i == 4 ? _f4 : _i == 5 ? _f5 : _i == 6 ? _f6 :
_i == 7 ? _f7 : _i == 8 ? _f8 : _i == 9 ? _f9 : na
[_fn, _f1]
//-----------------------------------------------------------------------------------------------------------------------------------------------------------------
// Inputs
//-----------------------------------------------------------------------------------------------------------------------------------------------------------------
// Source
src = input(defval=hlc3, title="Source")
// Poles
int N = input.int(defval=4, title="Poles", minval=1, maxval=9)
// Period
int per = input.int(defval=144, title="Sampling Period", minval=2)
// True Range Multiplier
float mult = input.float(defval=1.414, title="Filtered True Range Multiplier", minval=0)
// Lag Reduction
bool modeLag = input.bool(defval=false, title="Reduced Lag Mode")
bool modeFast = input.bool(defval=false, title="Fast Response Mode")
//-----------------------------------------------------------------------------------------------------------------------------------------------------------------
// Definitions
//-----------------------------------------------------------------------------------------------------------------------------------------------------------------
// Beta and Alpha Components
beta = (1 - math.cos(4*math.asin(1)/per)) / (math.pow(1.414, 2/N) - 1)
alpha = - beta + math.sqrt(math.pow(beta, 2) + 2*beta)
// Lag
lag = (per - 1)/(2*N)
// Data
srcdata = modeLag ? src + (src - src[lag]) : src
trdata = modeLag ? ta.tr(true) + (ta.tr(true) - ta.tr(true)[lag]) : ta.tr(true)
// Filtered Values
[filtn, filt1] = f_pole(alpha, srcdata, N)
[filtntr, filt1tr] = f_pole(alpha, trdata, N)
// Lag Reduction
filt = modeFast ? (filtn + filt1)/2 : filtn
filttr = modeFast ? (filtntr + filt1tr)/2 : filtntr
// Bands
hband = filt + filttr*mult
lband = filt - filttr*mult
// Colors
color1 = #0aff68
color2 = #00752d
color3 = #ff0a5a
color4 = #990032
fcolor = filt > filt[1] ? #0aff68 : filt < filt[1] ? #ff0a5a : #cccccc
barcolor = (src > src[1]) and (src > filt) and (src < hband) ? #0aff68 : (src > src[1]) and (src >= hband) ? #0aff1b : (src <= src[1]) and (src > filt) ? #00752d :
(src < src[1]) and (src < filt) and (src > lband) ? #ff0a5a : (src < src[1]) and (src <= lband) ? #ff0a11 : (src >= src[1]) and (src < filt) ? #990032 : #cccccc
//-----------------------------------------------------------------------------------------------------------------------------------------------------------------
// Outputs
//-----------------------------------------------------------------------------------------------------------------------------------------------------------------
// Filter Plot
filtplot = plot(filt, title="Filter", color=fcolor, linewidth=3)
// Band Plots
hbandplot = plot(hband, title="Filtered True Range High Band", color=fcolor)
lbandplot = plot(lband, title="Filtered True Range Low Band", color=fcolor)
// Channel Fill
fill(hbandplot, lbandplot, title="Channel Fill", color=color.new(fcolor, 80))
// Bar Color
barcolor(barcolor)
longCondition = ta.crossover(close, hband) and timeCondition
closeAllCondition = ta.crossunder(close, hband) and timeCondition
if longCondition
strategy.entry("long", strategy.long)
if closeAllCondition
strategy.close("long")
- Tendência escalável de curto prazo baseada na dupla média móvel e no RSI
- Estratégia de negociação de impulso de filtro de duplo alcance
- A taxa de variação da taxa de variação da taxa de variação da taxa de variação da taxa de variação da taxa de variação da taxa de variação da taxa de variação da taxa de variação da taxa de variação da taxa de variação da taxa.
- Estratégia de limiar dinâmico adaptativo de séries temporais baseada em dados sobre o património
- Estratégia de ruptura de alta e baixa da sessão asiática
- Trader de tendências de Marcus com estratégia de setas e alertas
- Tendência cruzada de média móvel dupla da EMA na sequência da estratégia
- Estratégia de cruzamento da média móvel
- Estratégia de impulso do RSI com TP e SL manuais
- Estratégia de acompanhamento da tendência e do ímpeto do EMA RSI
- Estratégia de negociação de alta frequência combinando bandas de Bollinger e DCA
- Tendência modificada do índice de força relativa na sequência da estratégia
- Estratégia de ruptura de alta intradiária
- EMA-MACD-SuperTrend-ADX-ATR Estratégia de sinais de negociação multi-indicadores
- Estratégia de rede de posições variáveis baseada na tendência
- Estratégia de combinação de Supertrend e Bandas de Bollinger
- Tendência do MACD Seguindo a Estratégia
- Estratégia de cruzamento da média móvel dupla da EMA
- XAUUSD Estratégia de Scalping de 1 Minuto
- Breakout de canal baseado em vector Candle e estratégia de ChoCH personalizada